퍼스텍, 틸트덕트 수직이착륙 비행로봇시스템 개발

이 사업은 지난 2012년 지식경제부의 로봇산업원천기술개발사업 일환으로 진행됐다. 퍼스텍이 주관하고 한국항공우주연구원·카이스트(KAIST)·유콘시스템 등이 개발에 참여했다.
퍼스텍은 지상시스템 및 체계 기술을 담당했다. 한국항공우주연구원·KAIST·유콘시스템은 각각 비행체 및 정밀제어, 목표물 추적, 항전장비와 임무장비 기술을 맡았다.
수직이착륙 비행로봇시스템은 비행체시스템과 이동식 지상통제시스템으로 구성돼 있다. 비행체시스템은 '틸트덕트(Tiltduct)' 형상의 날개를 적용해 지상의 구조물로부터 날개를 보호하고 추력을 30% 이상 증가시킨 장치다. 이동식 지상통제시스템에는 2.5t급 통제차량 내부에 지상통제시스템(GCS)이 탑재돼 있다.
틸트덕트 비행체는 1시간30분 이상 체공과 최대속도 150km/h로 비행이 가능하다. 외부와 연결된 도킹스테이션은 비상시 개활지가 아닌 도로상에서도 비행체가 이착륙 할 수 있는 환경을 제공해 무인항공기 운용 효율성을 높인다.
활주로가 없는 지역에서도 운용할 수 있다. 지상 및 해상의 재난안전분야, 국방분야는 물론 실시간 동식물 분포현황 조사, 차량 추적, 에너지 설비 및 대형구조물 원격진단 등 다양한 분야에 활용이 가능하다는 게 회사 측의 설명이다.
안혜원 한경닷컴 기자 anhw@hankyung.com
-
기사 스크랩
-
공유
-
프린트
-
1
기업 밸류업 공시 가이드라인이 다음주 공개된다. 상장사가 스스로 자사 기업가치를 평가하고 가치를 끌어올릴 방안을 자율공시하도록 하는 게 골자다.26일 한국거래소는 다음달 2일 ‘기업 밸류업 지원방안 2차 세미나’를 열고 기업가치 제고 계획 가이드라인을 발표한다고 밝혔다. 가이드라인은 상장사가 밸류업 공시를 최소 연 1회 하는 게 바람직하다는 내용을 담을 전망이다. 기업이 직접 자본비용, 자본수익성, 지배구조, 주가 등을 고려해 자사의 적정 기업가치를 분석해야 한다. 이를 바탕으로 3년 이상 중장기 기업가치 목표 수준과 도달 시점, 도달 방안 등을 정해 공시하는 식이다. 기업가치 제고 계획 공시 2년 차부터는 기업이 앞서 내놓은 전년도 계획과 현재 상황을 비교하고 그간 어느 정도 계획이 실행됐는지 등을 밝혀야 한다. 거래소는 가이드라인에 별도 시행 시점을 명시하지 않고 준비 기업부터 공시할 수 있게 한다는 방침이다.밸류업 공시는 거래소 자율공시로 분류할 예정이다. 자율공시는 금융감독원의 전자공시시스템을 거치지 않아 금감원의 규정을 적용받지 않는다. 기업의 판단에 따라 공시 여부, 횟수, 내용 등을 정할 수 있다는 얘기다.기업이 업황 등 각종 여건 변화를 반영해 기업가치 제고 계획을 수시로 변경해 공시할 수도 있다.선한결 기자
-
2
다음달 열릴 글로벌 암학회를 앞두고 신약 개발 기업에 대한 기대가 커지고 있다. 26일 한국거래소에 따르면 코스닥시장에서 HLB 주가는 0.46% 상승한 11만100원에 거래를 마쳤다. 간암 신약인 리보세라닙을 개발 중인 HLB는 지난 2월부터 이날까지 35.09% 올랐다. 암 신약을 개발하고 있는 유한양행과 에이비엘바이오 주가도 같은 기간 각각 19.93%, 12.73% 상승했다.다음달 31일(현지시간) 열릴 ‘미국 임상종양학회(ASCO 2024)’가 가까워지자 제약·바이오 업종에 대한 투자심리가 개선되는 모습이다. ASCO는 JP모간헬스케어콘퍼런스와 함께 글로벌 제약·바이오산업의 최대 행사로 꼽힌다. 여기서 공개되는 임상 결과에 따라 각 기업의 주가가 요동치기도 한다.전문가들은 임상 초록이 발표되는 다음달 23일까지 ASCO 참가 기업의 주가가 강세를 보일 것으로 예상한다. 최근 5년간 ASCO 임상 초록 제목이 공개된 후 실제 초록이 발표되기까지 국내 참가 기업의 주가는 평균 8%가량 오른 것으로 집계됐다. 다만 초록 발표 이후에는 임상 기대가 사그라들며 주가가 약세를 보인 사례가 많았다. 올해는 10여 개 국내 기업이 ASCO에서 연구 성과를 공개할 예정이다.특히 시장의 관심을 끄는 기업은 HLB와 유한양행이다. 두 회사 모두 올해 암 신약의 미국 식품의약국(FDA) 승인을 앞두고 있다. 학회에서 발표될 임상 결과가 글로벌 시장 진출의 전초전인 셈이다.김혜민 KB증권 연구원은 “그동안 고금리 환경에서 제약·바이오 섹터는 시장의 외면을 받았지만 ASCO를 기점으로 기술력을 갖춘 기업들에 대한 시선이 바뀔 수 있다”고 말했다.전효성 기자
-
3
악재에 떨어졌다 다음날 회복…증시 일주일째 '오르락내리락'
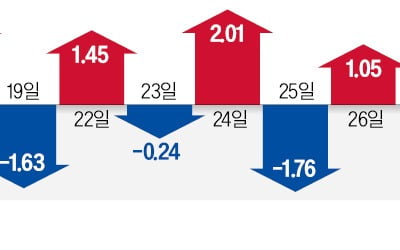
국내 증시가 1주일째 횡보를 거듭하고 있다. 미국 기준금리 인하 지연 가능성, 국제 유가 상승 우려, 인공지능(AI)산업 성장 둔화 등의 악재가 불거지면 떨어졌다가 다소 완화되는 조짐이 보이면 다시 주가가 상승하는 현상이 반복되고 있다. 어느 쪽으로든 지수를 명확히 이끌 만한 동력이 부족하다는 얘기다. 전문가들은 다음달 공개되는 기업 밸류업 계획 가이드라인과 엔비디아 실적이 증시의 향방을 가늠하는 분수령이 될 것으로 보고 있다.26일 코스피지수는 1.05% 오른 2656.33으로 장을 마감했다. 지난 22일부터는 매일 -1.76~2.01% 사이에서 등락을 반복했다. 특별한 주도주를 찾기 어려운 형국이다. 24일 각각 4.11%, 5.15% 상승 마감한 삼성전자와 SK하이닉스는 전날 2.93%, 5.12%씩 내렸다가 이날 다시 0.52%, 4.22% 올라 거래를 마쳤다. 기아(1.37%) 현대차(-0.2%) 삼성바이오로직스(-1.28%) 등도 이날 혼조세였다. 코스닥지수는 0.42% 오른 856.82로 거래를 마쳤다. 에코프로비엠(0.85%), HLB(0.46%)는 상승했지만 에코프로(-1.94%), 엔켐(-0.71%)은 하락 마감했다.조병현 다올투자증권 연구원은 “미국 국내총생산(GDP) 증가율 둔화와 개인소비지출(PCE) 가격지수의 예상 밖 강세로 인해 기준금리 인하가 오는 12월에나 가능할 것으로 보인다”며 “국내 기업들이 1분기 비교적 괜찮은 실적을 냈지만 지수는 쉬어가는 양상”이라고 설명했다.다음주 발표될 기업 밸류업 계획 가이드라인은 관심이다. 관련 수혜주인 KB금융(9.67%), 신한지주(7.47%), 하나금융지주(6.01%) 등 금융주가 주주환원책 강화 발표와 맞물려 이날 상승 마감하는 등 기대가 커지고 있다.이종형 키움증권 리서치센터장은 “엔비디아


![구글, 사상 첫 배당 '주당 20센트'…AI 불안감 덮었다 [글로벌마켓 A/S]](https://timg.hankyung.com/t/560x0/photo/202404/B20240426073327760.jpg)








![[오늘의 arte] 티켓 이벤트 : 윤한결의 한경아르떼필과 브람스 교향곡](https://timg.hankyung.com/t/560x0/photo/202404/AA.36536873.3.jpg)