아주대 연구팀, 신개념 '로봇 촉각 감지 기술' 개발
-
기사 스크랩
-
공유
-
댓글
-
클린뷰
-
프린트
기존에는 로봇의 관절 부위 등에 '힘·토크 센서'를 부착하는 방식이 주로 사용됐는데, 대상 물체의 표면이 원통이나 구형처럼 정형화되지 않고 복잡할 경우 요구되는 연산량이 많아 정확한 측정이 어렵다는 한계가 있었다.
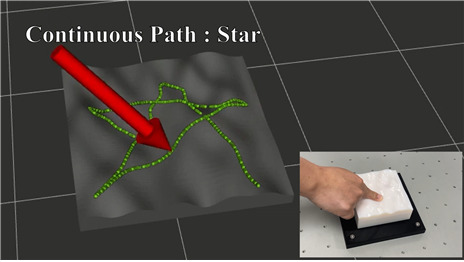
이에 김의겸 아주대 기계공학과 교수 연구팀은 컴퓨터 그래픽에서 물체의 형상을 표현할 때 사용되는 '삼각 메쉬 구조'(삼각형들의 조합으로 만들어진 다양한 기하학적 구조)에 주목했다.
특정 물체의 표면을 수많은 삼각형으로 이뤄진 메쉬 구조로 인식한 뒤 이를 바탕으로 정확한 접촉 정보를 알아낼 수 있는 알고리즘을 개발한 것이다.
연구팀은 해당 알고리즘에 더불어 이를 실현할 수 있는 장치를 개발한 뒤 관련 실험을 진행했다.
그 결과 0.4ms의 빠른 연산 속도로 0.134mm 이내의 정밀한 접촉 위치 정보를 확인할 수 있었다고 연구팀은 밝혔다.
김 교수는 "이번 연구 결과는 정교한 힘 제어가 필요한 휴머노이드 또는 산업용 협동 로봇을 개발하는 과정에서 유용하게 활용될 수 있을 것"이라고 말했다.
이번 연구 결과는 자동화 및 제어 분야의 저명 학술지는 'IEEE 산업정보학회 저널'(IEEE Transactions on Industrial Informatics) 지난 달 호에 게재됐다.
/연합뉴스
-
1
강원도 횡성의 한 야산에서 불이 났지만 초기에 진압했다. 인근 주민이 집 수돗물을 끌어다 불을 끄는 기지를 발휘하면서다. 15일 소방 당국에 따르면 이날 오후 2시 36분께 횡성군 청일면 한 야산에서 불이 ...

-
2
"농약통에 주스 넣어 뿌려?"…백종원, 이번엔 식품위생법 어겼나
백종원 더본코리아 대표가 이번엔 식품위생법을 어겼다는 의혹이 나오고 있다. 15일 관련 업계에 따르면 최근 온라인 커뮤니티에는 백 대표의 식품위생법 위반 가능성이 제기됐다. 특히 국민신문고와 식품의...

-
3
김수현 "故 김새론 모친 직접 뵙고 충분한 설명 드리고파"
배우 김수현 측이 고(故) 김새론과 관련한 과거 사진 등이 계속해서 공개되자 이에 대한 추가 입장을 냈다. 또 김새론의 모친에게 만나고 싶다는 뜻도 전했다.김수현 소속사 골드메달리스트는 15일 추가 자료를 내고 "3...


![K팝 업계에도 '친환경' 바람…폐기물 되는 앨범은 '골칫거리' [연계소문]](https://img.hankyung.com/photo/202206/99.27464274.3.jpg)


