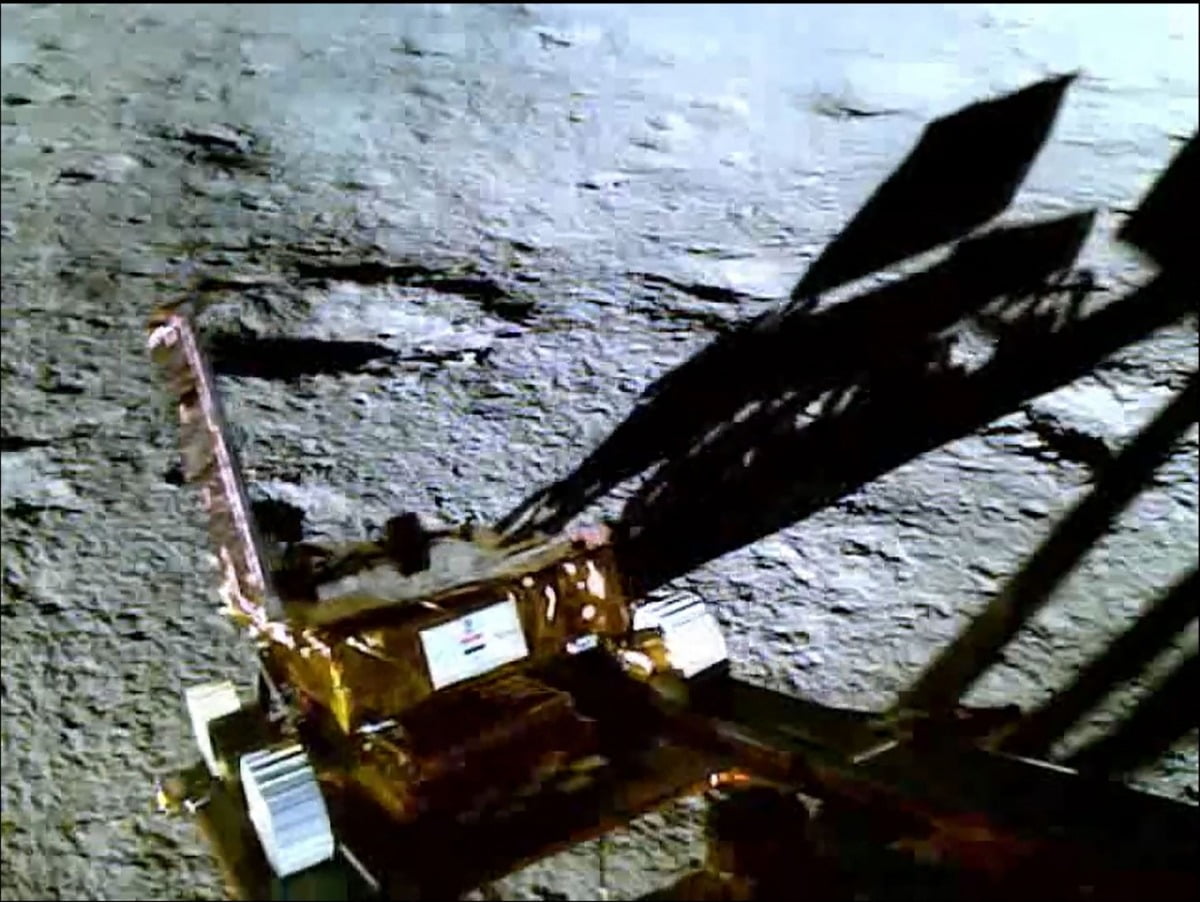
인도 "세계 최초 달 남극 탐사로봇, 100m 이동하며 활동"
S. 소마나트 인도우주연구기구(ISRO) 원장은 2일(현지시간) 인도의 첫 태양관측 위성 '아디티아 L1'의 발사에 대한 생중계를 마치면서 이 같은 찬드라얀 3호 소식을 알렸다고 인도 매체들이 전했다.
소마나트 원장은 "좋은 소식은 탐사로봇(프라기안)이 착륙선(비크람)에서 약 100m를 이동했다는 것"이라며 "우리는 하루나 이틀 동안 이들 둘을 잠재우는 절차를 시작할 것"이라고 말했다. 비크람과 프라기안이 임무 종료 시간이 다가옴에 따라 하루나 이틀 동안 활동을 멈추도록 해 임무 종료 이후에 밤을 날 수 있도록 '연습'을 시키겠다는 것이다.
이들 둘은 착륙 이후 달의 하루에 해당하는 14일 정도 임무를 수행하기로 돼 있어 오는 7일이나 8일 임무가 끝난다. 이후 지구로 돌아오지 않고 달 표면에 머물며 태양광 패널에 의해 생성되는 에너지로 지탱하도록 설계돼 있다. 소마나트 원장은 이들이 공식 임무 종료 이후에도 임무를 수행하면 ISRO는 그들에게서 오는 정보를 계속 취합할 것이라고 설명했다.
안혜원 한경닷컴 기자 anhw@hankyung.com
-
기사 스크랩
-
공유
-
프린트
-
1
인도 남부 도시 첸나이와 벵갈루루에 한국 비자신청센터가 동시에 개소했다.인도에서 한국 비자신청센터가 문을 연 것은 2011년 뉴델리에 이어 이번이 두 번째다.주첸나이 총영사관(총영사 김창년)은 지난달 31일 첸나이 시내 VFS 글로벌 빌딩에서 한국 비자신청센터 개소식을 열었다고 1일 밝혔다.첸나이 센터는 1일 비자신청 접수, 발급된 비자 교부, 전화 상담 등 업무를 개시했다.비자 심사와 발급 업무는 종전과 같이 총영사관이 하게 된다.이와 함께 벵갈루루 한국 비자신청센터도 문을 열어 1일 자로 업무를 시작했다.김 총영사는 첸나이 센터 개소식 인사말에서 "첸나이를 비롯한 남인도 지역에서 한국에 대한 관심이 크게 높아지면서 비자신청 건수도 코로나 사태 이전 수준으로 빠르게 회복하고 있다"고 말했다.그는 "이번 첸나이 비자신청센터 개소를 통해 인도 비자 신청자들이 더 쾌적한 환경에서 민원을 처리하는 등 민원인 편의가 증진될 것으로 기대된다"고 덧붙였다.주첸나이 총영사관 비자 신청 건수는 2019년 1만6천548건을 기록한 이후 코로나19로 급감했다가 지난 7월 말 현재 7천600여건으로 코로나19 이전 수준을 회복하는 상황이다.주첸나이 총영사관이 관할하는 타밀나두, 카르나타카, 안드라프라데시, 케랄라 등 남인도 4개 주는 인구 2억5천만명에 소득수준도 인도 평균보다 더 높다.한류에 대한 관심도 높아 한국 방문 수요도 여타 지역에 비해 높은 수준이다.특히 현대차와 기아, 삼성전자, 포스코 등 300여개의 우리 기업이 진출해 있어 기업활동에 따른 비자 발급 수요도 크게 늘고 있다.이번에 벵갈루루에도 센터가 문을 열어 한국 비자를 신청하기 위해 벵갈루루에서 첸나이까지 차량으로 편도 8시간 이상 이동해야 하는 번거로움을 덜게 됐다.VFS 글로벌은 전 세계 141개국에서 3천525개 사무소를 운영하는 비자 대행 서비스 전문업체로, 첸나이에서도 유럽연합(EU)과 영국, 일본, 캐나다, 호주, 뉴질랜드 등 43개국 비자 업무를 대행하고 있다./연합뉴스

-
2
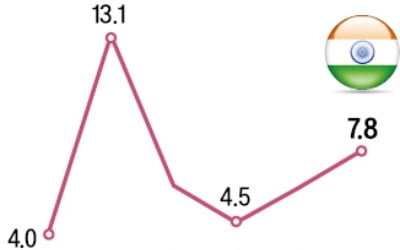
인도, 2분기 7.8% 高성장…서방 脫중국 수혜 본격화
인도 경제가 2분기에도 빠른 성장세를 유지했다. 미국과 유럽연합(EU) 등 주요 선진국의 긴축으로 신흥국 대부분이 어려움을 겪고 있지만 인도에 탈중국 투자금이 몰리며 경제가 활기를 띠는 것으로 분석됐다.31일(현지시간) 로이터통신 등에 따르면 인도의 2분기 국내총생산(GDP) 증가율은 전년 대비 7.8%로, 지난 1분기 6.1%에 비해 높아졌다. 인도중앙은행(RBI)이 예측한 8%보다 소폭 낮았지만, 중국과 인도네시아의 같은 기간 경제성장률인 6.3%와 5.2%를 각각 웃돌았다.국제통화기금은 올해 인도의 연간 경제성장률이 6.1%에 달할 것으로 예상했다. 인도는 지난해 국가별 GDP 규모 순위에서 영국을 사상 처음으로 누르고 5위에 올랐다. 인도국영은행 SBI는 인도의 GDP 규모가 2027년엔 독일, 2029년에는 일본을 제치고 미국·중국에 이어 세계 3위에 오를 것으로 예상했다.지난 2분기 인도의 성장은 호텔, 상거래, 운송 등 서비스 부문의 거래 증가가 이끌었다. 건설과 제조업 부문도 안정적인 성장세를 유지했다. 인도의 대외 수출은 중국과 독일 등의 경기 둔화 영향으로 10분기 만에 감소했지만, 내수가 이를 만회했다.인도의 빠른 성장은 글로벌 기업들의 탈중국에 따른 반사이익 덕분인 것으로 분석된다. 인도는 베트남 인도네시아 등과 함께 대체 생산기지로 주목받으면서 해외 기업들의 투자금이 유입되고 있다. 아이폰을 생산하는 대만 기업 폭스콘은 인도 벵갈루루 등에 12억달러(약 1조6000억원)를 투자해 공장을 짓고 있다. 미국 반도체 기업 AMD는 4억달러(약 5300억원) 규모의 반도체 디자인센터를 설립하기로 했다.인도 증시에도 자금이 유입돼 니프티500 지수는 올 들어 이날까지 9%가량 상승했다. 아마존과 구글 등 글로벌 서비스 기업도 14억 인구의 인도 시장을 겨냥하고 각각 260억달러(약 34조7000억원)와 100억달러(약 13조3000억원) 규모의 자금을 투입하기로 했다.러시아산 석유를 싼값에 공급받은 점도 빠른 성장세에 기여하고 있다. 인도는 석유의 86% 이상을 수입해 유가가 10달러 상승할 때마다 경상수지 적자가 100억달러 이상 증가하고, GDP가 약 0.5% 감소하는 것으로 추정된다. 블룸버그통신에 따르면 인도는 최근 러시아산 석유 수입량을 급격히 늘리면서 지난 5월 러시아산이 수입 원유의 절반가량을 차지했다.하반기에는 인도 농업 부문이 경제 성장의 발목을 잡을 수 있다는 지적이 나온다. 인도의 농업 부문은 GDP의 18.3%가량을 차지하며 농업 종사자가 총생산 인구의 40%가 넘는다. 상반기에 지역·기간별로 불균일한 강수량을 기록했고, 지난 8월 100년 만에 비가 가장 적게 내려 여름작물 수확량 감소가 예상된다. 이와 함께 인도 엘라라캐피털의 가리마 카푸르 이코노미스트는 “인플레이션과 높은 기준 금리가 지속되면서 인도 루피화가 신흥국 통화 중 상대적으로 강세를 보여 경제 성장에 걸림돌이 될 수 있다”고 지적했다.이현일 기자 hiuneal@hankyung.com
-
3
인도, 2분기 GDP 증가률 7.8%…탈중국 수혜 성장 가속
인도 경제가 2분기에도 빠른 성장세를 유지했다. 미국과 유럽연합(EU) 등 주요 선진국의 긴축으로 신흥국 대부분이 어려움을 겪는 가운데 인도는 탈중국 투자금이 밀려들어 경제가 활기를 띠는 것으로 분석된다. 31일(현지시간) 로이터통신 등에 따르면 인도의 2분기 국내총생산(GDP) 증가율은 전년 대비 7.8%로, 지난 1분기 6.1%에 비해 높아졌다. 인도중앙은행(RBI)의 예측했던 8%보다는 조금 낮았으나, 같은 기간 중국과 인도네시아의 경제성장률 6.3%와 5.2%를 대폭 웃돌았다.호텔, 상거래, 운송 등 서비스 부문의 거래 증가가 전체 성장을 이끌었다. 건설 부문과 제조업 부문도 안정적인 성장세를 유지했다. 인도의 대외 수출은 중국과 독일 등의 경기 둔화의 영향으로 10분기 만에 감소했지만, 내수가 이를 만회했다. 인도의 빠른 성장은 서방 글로벌 기업들의 탈중국으로 인한 반사이익 때문으로 분석된다. 인도는 베트남 인도네시아 등과 함께 대표적인 대체 생산기지로 주목받으면서 글로벌 기업들의 투자금이 유입되고 있다. 아이폰을 생산하는 대만 기업 폭스콘은 인도 벵갈루루 등에 12억달러(약 1조6000억원)를 투자해 공장을 짓고 있다. 미국 반도체 기업 AMD는 4억달러(약 5300억원) 규모 반도체 디자인 센터를 설립하기로 했다. 선진국 금융권 자금도 인도 증시로 쏟아져 들어가 니프티500 지수는 올들어 9.47%가량 상승했다. 아마존과 구글 등 글로벌 서비스 기업들도 14억 인구의 인도 시장을 노리고 각각 인도에 260억달러(약 34조7000억원)와 100억달러(약 13조3000억원) 규모의 자금을 투입하기로 했다.다만 인도 농업 부문이 하반기 경제 성장의 발목을 잡을 수 있다는 지적이 나온다. 인도의 농업 부문은 GDP의 18.3% 가량을 차지하며, 농업 종사자가 총 생산 인구의 40%가 넘는다. 인도는 상반기에 지역별·기간별로 불균일한 강수량을 기록했고, 지난 8월에는 100년 만에 비가 가장 적게 온 탓에 여름 작물 수확량 감소가 예상되기 때문이다. 인도 뭄바이의 엘라라 캐피탈의 가리마 카푸르 이코노미스트는 로이터통신과의 인터뷰에서 "인플레이션과 높은 기준 금리가 지속되는 가운데 루피화가 신흥국 통화 중 상대적으로 강세를 보여 경제 성장에 걸림돌이 될 수 있다"고 지적했다. 이현일 기자 hiuneal@hankyung.com










![[단독] 홈플러스, 슈퍼마켓 사업 부문 매각한다](https://timg.hankyung.com/t/560x0/photo/202406/AA.36922731.3.jpg)
![[오늘의 arte] 예술인 QUIZ : 가택 연금됐던 러시아의 '反푸틴' 감독](https://timg.hankyung.com/t/560x0/photo/202406/AA.36920360.3.jpg)