스파이더맨이 쓰는 '거미줄' 소프트 로봇 개발
-
기사 스크랩
-
공유
-
댓글
-
클린뷰
-
프린트
센서, 접착, 청소 기능 갖춘 섬유 모양 소프트 로봇
인공근육, 전자피부, 소프트 집게 등에 활용 기대
과학기술정보통신부 산하 한국연구재단은 선정윤 서울대 재료공학부 교수와 이영훈 송원준 박사과정 연구원, 김호영 기계공학부 교수가 이같은 거미줄을 개발해 해당 연구성과를 로봇공학 분야 학술지 '사이언스 로보틱스' 표지논문으로 실었다고 16일 발표했다.
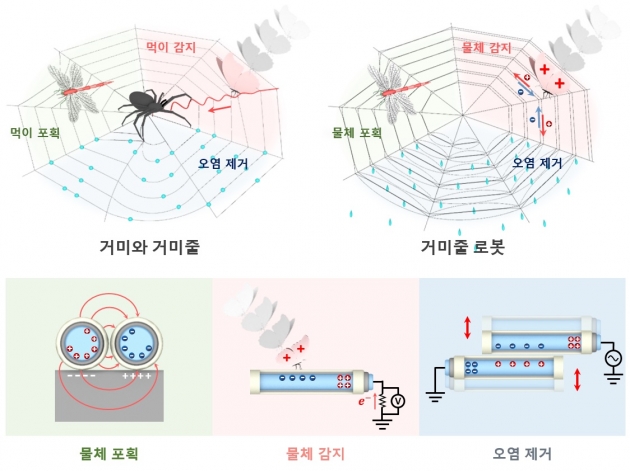
연구팀은 전하를 감지하는 안테나(전극)역할을 하는 특수 소재 '오가노젤'을 만들었다. 거미줄 로봇의 핵심기술이다. 고분자물질 '아크릴아마이드'에 염화리튬을 첨가한 용매제 '에틸렌글리콜'을 넣어 오가노젤을 제작했다. 이 오가노젤을 실리콘 화합물 탄성체인 폴리다이메틸실록산(PDMS)으로 둘러싸 샤프심 두께의 거미줄을 완성했다. 거미줄 로봇 두 줄이 상황에 따라 각각 양극과 음극으로 분리돼 한 쌍으로 작동한다.
이 거미줄 로봇에 직류 고전압을 주면, 수 ㎝거리의 주위에 전기장을 만들어 물체를 자극(전기 분극을 유도)해 저절로 달라붙게 한다. 정전유도 현상(electrostatic induction)이다. 연구팀은 나뭇잎, 유리, 알루미늄, 특수수지인 PMMA(폴리메틸메타크릴레이트) 등을 거미줄 로봇에 자유롭게 붙였다 떼는 실험 장면을 공개했다. 거미줄 로봇의 모든 구성요소는 신축성 소재로 돼 있어 3배까지 늘어날 수 있다. 로봇 자체 무게 0.2g보다 68배 무거운 물체까지 포획이 가능하다.
거미줄 로봇은 자체 정화 기능도 갖췄다. 거미는 새총이나 기타줄을 잡아당겼다 놓는 형태로 관성을 이용해 거미줄에 붙은 오염물질을 털어낸다. 연구팀은 거미줄 로봇에 포획할 때완 반대로 교류 전압을 주면 거미줄이 초당 수백 번까지 빠르게 진동하며 표면의 오염물질을 털어낼 수 있게 했다. 이물질이 껴 포획력이 낮아지는 것을 방지하기 위해서다.
이해성 기자 ihs@hankyung.com
-
1
현대차가 세계적 콘텐츠 기반 미디어 그룹 '소니 픽처스 엔터테인먼트'와 전략적 파트너십을 체결했다고 28일 밝혔다. 이번 파트너십에는 영화, 애니메이션, 디지털 콘텐츠 등 소니 픽처스의 다양한 플랫폼에...

-
2
마블, 한 달간 '어벤져스·스파이더맨·시빌워' 등 공짜로 푼다
마블이 <어벤져스>, <스파이더맨>, <시빌워> 등 다양한 인기 만화를 한 달간 무료로 제공한다. 신종 코로나바이러스 감염증(코로나19) 확산으로 집안에서 지내야 하는 사람들을 위해서다. 주요 외신들에 따르면 마블은...
-
3
스파이더맨, 마블 떠난 후…소니 "디즈니, 실망스럽지만 결정 존중"
스파이더맨 제작에 마블이 손을 땐다는 소식이 알려진 후 소니픽처스 측에서 직접 입장을 밝혔다. 20일(현지시각) 소니픽처스는 공식 SNS를 통해 "('스파이더맨' 제작과 관련해 마블이 손을 뗀다는) 대...


![K팝 업계에도 '친환경' 바람…폐기물 되는 앨범은 '골칫거리' [연계소문]](https://img.hankyung.com/photo/202206/99.27464274.3.jpg)


