'달걀 옮기고 피아노 치고'…사람 손 닮은 로봇 손 개발
-
기사 스크랩
-
공유
-
댓글
-
클린뷰
-
프린트
한국기계연구원은 도현민 박사 연구팀이 달걀을 집어서 옮기거나 가위질을 하는 등 일상생활에서 다양한 물체와 도구를 조작할 수 있는 사람 손 크기의 로봇 손을 개발했다고 22일 밝혔다.
각 방향으로 움직일 수 있도록 12개의 모터가 사용됐다.
연구팀은 물체의 힘을 측정할 수 있는 센서를 손가락 끝과 마디, 손바닥에 장착했다.
손가락 끝에 장착된 지름 15㎜, 무게 5g 이하의 센서는 로봇 손과 물체가 접촉할 때 감지되는 힘의 크기와 방향을 측정한다.
손가락 마디와 손바닥에는 서울대와 공동 연구를 통해 개발한 피부형 촉각 센서를 장착했다.
로봇 손과 물체가 접촉할 때 접촉 부위의 분포와 힘을 측정하게 된다.
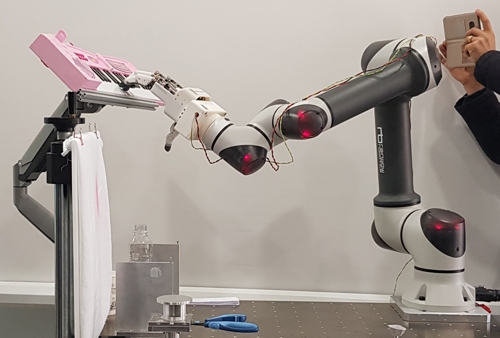
이 로봇 손은 물체의 모양과 종류에 구애받지 않는다고 연구팀은 설명했다.
달걀처럼 깨지기 쉬운 타원형 물체부터 매끄러운 구형의 사과까지 힘을 조절해가며 잡을 수 있다.

상용 로봇 손보다 가벼우면서 힘은 더 세다.
1㎏짜리 로봇 손이 3㎏ 넘는 물체를 들 수 있다.
무게 대비 쥐는 힘은 세계 최고 수준이라고 연구팀은 전했다.
비정형 물체를 조립하거나 정교한 움직임을 필요로 하는 산업 현장에 적용할 수 있다.
도현민 책임연구원은 "사람 손의 섬세한 움직임을 모방해 로봇 손을 개발했다"며 "서비스용 로봇과 파지(把指) 알고리즘 연구용 플랫폼 개발에 활용할 수 있을 것"이라고 기대했다.
/연합뉴스
-
1
K팝 춤추고 아이돌 응원봉 흔들며 尹탄핵 외치는 MZ세대
윤석열 대통령 탄핵안이 폐기된 이튿날인 8일 오후 서울 여의도 국회 앞에서 열린 '윤석열 즉각 탄핵! 즉각 구속! 촛불문화제' 집회에서 참석자들이 다양한 가수의 팬클럽 응원봉을 들고 노래를 부르며 윤 ...

-
2
경찰 "김용현 휴대전화 등 18점 압수…계엄 당시 사용 여부 확인 중"
'12·3 비상계엄 사태'를 수사하는 경찰이 김용현 전 국방부 장관이 사용한 것으로 추정되는 휴대전화 등을 확보했다.국가수사본부 비상계엄 특별수사단은 8일 "오전 10시부터 오후 7시 20...

-
3
화려한 에스파 '위플래시' 무대 뒤엔 이 사람 있었다 [김수영의 크레딧&]
"위-위플래시~위-위플래시""암 마 겟 잇 던~ 오에오에오""사건은 다가와~ 아오에"올해 최고의 가수가 그룹 에스파(aespa)라는 점에 이견은 없을 듯하다. '슈퍼노바'를 시작으로 '...
![화려한 에스파 '위플래시' 무대 뒤엔 이 사람 있었다 [김수영의 크레딧&]](https://img.hankyung.com/photo/202412/01.38859538.3.jpg)