[현대모비스 부품 이야기] 자율주행차 기술… 한 뼘의 오차 극복하라
-
기사 스크랩
-
공유
-
댓글
-
클린뷰
-
프린트
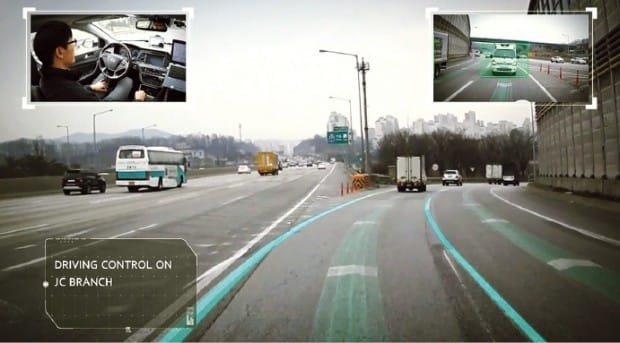
편도 4차로의 2차로에 있는 운전자는 300m 전방에서 우회전하기 위해 오른쪽 방향으로 차선을 두 번 갈아타야 한다. 완전 자율주행차가 임무를 완수하기 위해 가장 먼저 필요한 정보는 무엇일까? 바로 현재 자리하고 있는 차로의 정확한 위치다.
하지만 현 위성항법장치(GPS) 환경에서, GPS 미수신 구간이 없는 ‘오픈 스카이(open sky)’ 상황에서 약 2.5m의 측위 오차가 발생하기도 한다. 국내 도로 구간(폭 3m)에서 폭이 2.5m인 자동차가 달리는 경우 좌우 여유 공간은 각각 25㎝에 불과하다. 횡 방향으로 성인의 한 뼘 간격밖에 남지 않는 도로 환경에서 수m의 GPS 오차가 발생한다면 ‘만약’이 허용되지 않는 자율주행기술의 신뢰성을 보장할 수 없다.
실제로 터널 등 GPS 신호 미수신 구간에선 이런 오차가 수십m까지 늘어난다. 또 차량이 고가도로 바로 아래를 달리는 경우에도 GPS는 차량이 지면에 위치했는지 고가 위에 있는지 구분할 수 없다. 경·위도 좌표만 있을 뿐 고가도로 진출입로 등 지형지물의 형상을 판별하는 기하(geometry) 정보가 없기 때문이다.
따라서 완전 자율주행차가 경로를 쫓아가는 ‘경로 추종’을 위해선 기하 정보에 대한 해석이 25㎝ 이내의 오차 범위에서 이뤄져야 한다. 이를 위해 업계에서는 ‘센서융합측위기술’에 투자하고 있다. 이 기술은 고정밀 지도 데이터와 차량 내 각종 센서 정보를 융합한 실시간 위치 측정에 기반을 둔다. 고정밀 지도는 각종 지형지물의 위치뿐만 아니라 경사도와 도로 곡률 등의 기하 정보를 포함한 것이다. 이 지도의 오차 범위는 20㎝ 내외다.
자율주행기술 구현을 위해선 여러 단계의 ‘융합’이 이뤄진다. 차량 내 카메라, 레이더, 라이다 등의 센서 정보가 합쳐지는 것을 ‘센서 융합’이라고 한다. 이런 센서 융합 정보를 고정밀 지도에 대입해 일치율을 계산하고 다시 위치를 역산하는 것을 맵-매칭이라고 부른다.
맵-매칭과 동시에 GPS 좌표 정보와 차량 관성센서가 추출한 추측항법(거리와 방향을 역산한 추측 항법)에 기반한 경로 정보가 생성된다. 이런 정보가 한데 모여 첨단운전보조시스템(ADAS) 제어기에서 최종적인 위치 정보가 융합된다.
이 기술을 탐험가에 비유하면 낮과 밤을 가리지 않고 악천후 속에서 실시간으로 삼각측량을 하는 동시에 움직이는 지형지물을 피하면서 달리는 것과 같다.
이렇게 차량의 정확한 위치가 파악돼야만 완전 자율주행차는 주행 전략을 수립할 수 있다. 주행 전략에는 고정밀 지도를 기반으로 주행 경로를 판단하는 ‘전역 경로 계획’과 변화하는 교통 상황을 반영해 차로 유지, 변경, 회피 등을 경로에 반영하는 ‘동적 경로 생성’이 포함된다. 이와 동시에 이런 경로를 자율주행차가 따라가도록 차량의 가감속과 방향 제어 등 경로 추종을 위한 제어 명령이 생성된다.
앞으로 차량 대 차량(V2V), 차량 대 인프라(V2I) 간 통신이 본격화되면 ‘이동 측량’도 가능해질 전망이다. 예를 들어 기존 고정밀 지도에 있던 건물이 재건축 공사로 철거된 경우 앞서가는 차가 후행 차량에 가시권 밖에 있는 최신 지형 정보를 알려주는 것이다. 측량 정보는 클라우드 서버를 통해 실시간으로 업데이트되고 각각의 차량에 재배포되는 방식이 유력하다.
이런 이동측량이 가능해지려면 초고속 네트워킹을 지원할 수 있는 데이터 전송 처리 기술이 필수적이다. LTE보다 100배 빠른 5G(20Gbps, 800Mb 다운로드 1초 미만) 시대에는 센서융합측위기술이 한층 탄력받을 것으로 전망된다.
현대모비스는 ADAS 기술과 C-ADAS(Connected ADAS) 등 선행기술을 바탕으로 현대엠엔소프트의 고정밀 맵을 융합해 자율주행에 필요한 인지·측위 알고리즘을 개발하는 데 역량을 집중하고 있다.
현대모비스 기술연구소
-
1
'신용카드 할부' 딱 한 달 늘렸을 뿐인데…명세서 보고 '깜짝'
카드사들이 한동안 중단했던 5~6개월 무이자 할부 혜택을 부활했다. 연말을 맞아 소비 심리를 되살리기&nbs...

-
2
"정치적 분열"…프랑스 신용등급 전망 Aa2→Aa3 강등
프랑스 정국이 혼란에 빠진 가운데 국제신용평가사 무디스가 14일(현지시간) 프랑스의 국가 신용등급을 Aa2에서 Aa3으로 한단계 낮췄다. 프랑스의 '정치적 위기'를 반영한 결정이다.A...

-
3
"中 흑자 파티, 한국은 사업 접을 판"…생각보다 심각한 상황 [성상훈의 배터리스토리]
“이대로면 사업을 접어야 하는게 아니냐는 내부목소리가 나오고 있습니다.” 국내 유일 음극재 업체인&nbs...
!["中 흑자 파티, 한국은 사업 접을 판"…생각보다 심각한 상황 [성상훈의 배터리스토리]](https://img.hankyung.com/photo/202412/01.38934975.3.jpg)

![K팝 업계에도 '친환경' 바람…폐기물 되는 앨범은 '골칫거리' [연계소문]](https://img.hankyung.com/photo/202206/99.27464274.3.jpg)


