SMEC, 로봇 관절 정밀 제어 기술 개발
-
기사 스크랩
-
공유
-
댓글
-
클린뷰
-
프린트
현재 자동차조립 등 산업현장에서 상용되고 있는 6축 관절 로봇은 마디마다 움직임을 제어하는 액츄에이터라는 관절로 연결돼 있다. 액츄에이터는 모터, 감속기, 엔코더로 구성된 것으로 모터의 회전 수를 조절해 관절을 움직여 팔처럼 작동하는 원리이다.
엔코더는 모터와 감속기의 회전 수를 세고 제어하는 장비이며 로봇에 사용되는 모터에는 모터의 성능을 효율적으로 높여주는 감속기가 부착되는데 기존 엔코더는 모터에만 부착돼 있어 감속기의 움직임까지는 직접적으로 제어하지 못했다.
이번에 SMEC가 개발한 특허는 엔코더를 모터와 감속기에 각각 부착해 제어함으로써 정교한 모션을 만들어내고 컨트롤 능력도 강화하는 기술에 관한 것이다. 해당 기술은 로봇 작업의 정밀도를 높여 신뢰성을 확보할 수 있는 기술로 로봇 제어 시 특히 높은 정밀도를 요구하는 산업용 로봇, 의료용 로봇 분야에서 활용도가 높을 것으로 전망된다.
회사 관계자는 "로봇의 정밀제어, 안정성 관련 기술은 고급 기술로써 선진국과의 기술 경쟁에서도 SMEC만의 독보적인 입지를 구축할 수 있을 것"이라고 말했다.
한경닷컴 최성남 기자 sulam@hankyung.com
-
1
과거 두 차례 사례를 보면 국회의 대통령 탄핵소추안 가결은 대체로 증시에 긍정적으로 작용했다. 정국 혼란을 어느 정도 수습해 불확실성을 완화하는 기점이 됐다. 하지만 최근 국내 경기와 세계 외교·통상 환...
-
2
역대급 바겐세일인데…"국장에 치가 떨려" 집 나간 개미들
국내 상장사들의 실적 대비 주식 가치가 2008년 금융위기 때보다 낮은 사상 최저 수준으로 떨어진 것으로 나타났다. 주요 산업 경쟁력 약화, 도널드 트럼프 미국 대통령 당선인의 자국 우선주의 정책 추진 우려 등 대내...

-
3
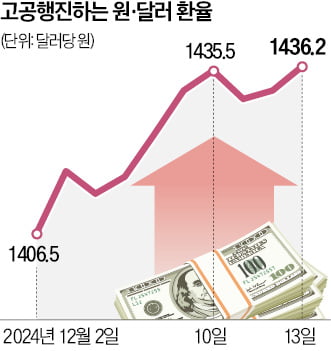
외환시장 '최악 시나리오' 피했다…원·달러 환율 1450원 돌파 가능성 낮아져
윤석열 대통령 탄핵소추안이 지난 14일 국회에서 가결되자 외환시장에선 “최악은 피했다”는 분석이 나온다. 다만 일부 전문가는 미국 중앙은행(Fed)의 기준금리 인하 지연과 도널드 트럼프 2기 행...