아주대 연구팀 "의수 등 여러 분야 활용 기대" 국제학술지에 논문
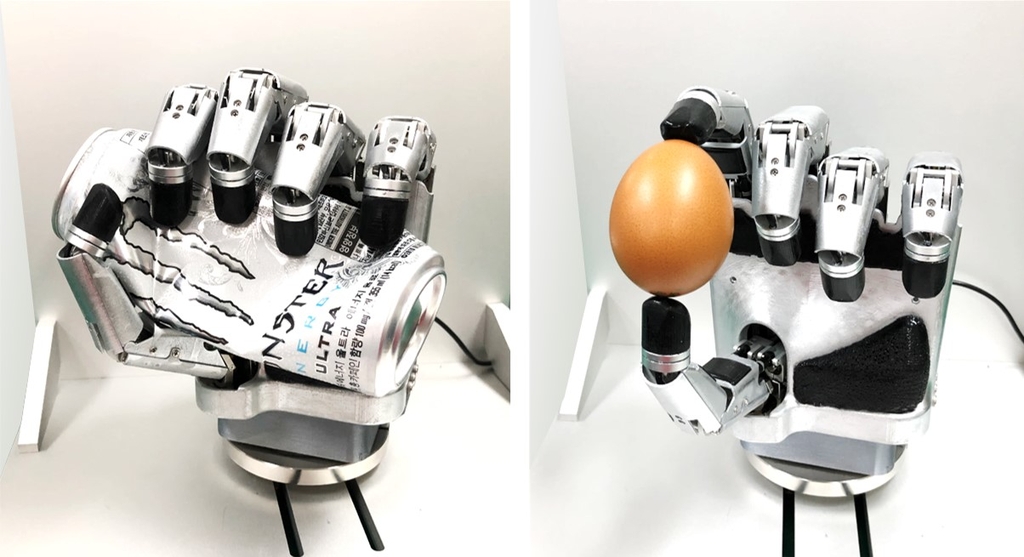
아주대학교 교수팀이 사람의 손처럼 섬세한 동작과 강한 악력을 동시에 구현할 수 있는 '로봇 손'을 개발하는 데 성공했다.
아주대 기계공학과 김의겸 교수팀은 이런 연구성과가 전날 관련 분야 국제학술지인 '네이처 커뮤니케이션즈'에 온라인 게재됐다고 16일 밝혔다.
일반적으로 로봇 손이 원활하게 움직이기 위해선 촉각 센서, 구동기, 제어기 등의 구성 요소가 필수적이다.
기존 로봇 손은 이런 요소들을 손 자체에 내장할 수 없어 팔뚝 형태의 추가 모듈이 포함돼야 했고, 이는 다른 상용 로봇 팔과의 결합을 어렵게 하는 단점으로 지적돼 왔다.
그러나 김 교수팀은 모든 구성요소가 로봇 손안에 내장된 형태라 상용 팔과의 결합이 원활하다.
그뿐만 아니라 로봇 손이 들고 운반할 수 있는 최대 무게(가반하중)가 18㎏으로 높아져 보다 폭넓은 제어가 가능해졌다.
아주대 관계자는 "NASA가 개발한 로봇의 가반하중이 9㎏인 것을 고려할 때 연구팀이 개발한 로봇 손의 가반하중은 매우 높은 수준"이라고 설명했다.

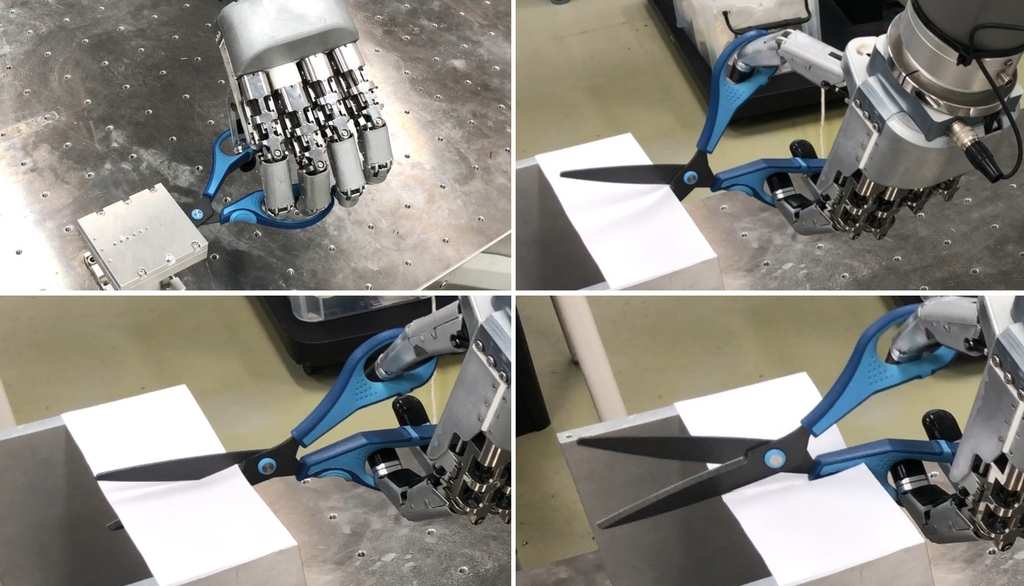
실제로 연구진은 이 로봇 손으로 ▲ 맥주 캔 찌그러뜨리기 ▲ 무거운 아령 들기 ▲ 가위로 종이 자르기 ▲ 핀셋으로 작은 칩 옮기기 등 기존 로봇 손으로는 불가능했던 동작을 시현하는 데 성공했다.
김 교수는 "의수를 비롯해 그리퍼(쥐는 도구) 등 여러 분야에서 쓰일 수 있다"며 "로봇 제어 연구, 딥러닝, 강화학습 연구 등에도 적용할 수 있어 우리 사회 여러 영역에서 널리 활용되길 기대한다"고 말했다.
이번 연구는 아주대 정착연구비 지원과 한국기계연구원 창의 도전형 과제 지원으로 수행됐다.
정다운 고려대 박사과정 학생이 공동 제1 저자로 참여했으며, 한국기계연구원(KIMM) 로봇메카트로닉스실과의 협력 연구로 진행됐다.
/연합뉴스
아주대학교 교수팀이 사람의 손처럼 섬세한 동작과 강한 악력을 동시에 구현할 수 있는 '로봇 손'을 개발하는 데 성공했다.
일반적으로 로봇 손이 원활하게 움직이기 위해선 촉각 센서, 구동기, 제어기 등의 구성 요소가 필수적이다.
기존 로봇 손은 이런 요소들을 손 자체에 내장할 수 없어 팔뚝 형태의 추가 모듈이 포함돼야 했고, 이는 다른 상용 로봇 팔과의 결합을 어렵게 하는 단점으로 지적돼 왔다.
그러나 김 교수팀은 모든 구성요소가 로봇 손안에 내장된 형태라 상용 팔과의 결합이 원활하다.
그뿐만 아니라 로봇 손이 들고 운반할 수 있는 최대 무게(가반하중)가 18㎏으로 높아져 보다 폭넓은 제어가 가능해졌다.
아주대 관계자는 "NASA가 개발한 로봇의 가반하중이 9㎏인 것을 고려할 때 연구팀이 개발한 로봇 손의 가반하중은 매우 높은 수준"이라고 설명했다.
김 교수는 "의수를 비롯해 그리퍼(쥐는 도구) 등 여러 분야에서 쓰일 수 있다"며 "로봇 제어 연구, 딥러닝, 강화학습 연구 등에도 적용할 수 있어 우리 사회 여러 영역에서 널리 활용되길 기대한다"고 말했다.
이번 연구는 아주대 정착연구비 지원과 한국기계연구원 창의 도전형 과제 지원으로 수행됐다.
정다운 고려대 박사과정 학생이 공동 제1 저자로 참여했으며, 한국기계연구원(KIMM) 로봇메카트로닉스실과의 협력 연구로 진행됐다.
![[속보] 이창수, '명태균 수사'에 "최종결정 제가 책임진다는 자세로"](https://img.hankyung.com/photo/202503/ZA.39802198.3.jpg)
![[속보] 이창수 지검장 "복귀 생각보다 시간 걸려…헌재 현명한 결정"](https://img.hankyung.com/photo/202503/ZN.39802205.3.jpg)