[월요인터뷰] 김상배 美 MIT 교수 "세상에서 가장 빠른 치타3 로봇에 사람과 똑같은 손 달겠다"
RC카에 꽂힌 청년, 세계적 로봇공학자로…
"1m 높이 뛰어 넘는 치타 로봇
사람처럼 냉장고 문 열 수 있어
2년 후 재해현장 누빌 것…
연세대 재학 때 스타트업 공동 창업
3D스캐너 만들고 스탠퍼드 입학
앞서가는 비결? 재밌는 일에 집중"
"1m 높이 뛰어 넘는 치타 로봇
사람처럼 냉장고 문 열 수 있어
2년 후 재해현장 누빌 것…
연세대 재학 때 스타트업 공동 창업
3D스캐너 만들고 스탠퍼드 입학
앞서가는 비결? 재밌는 일에 집중"
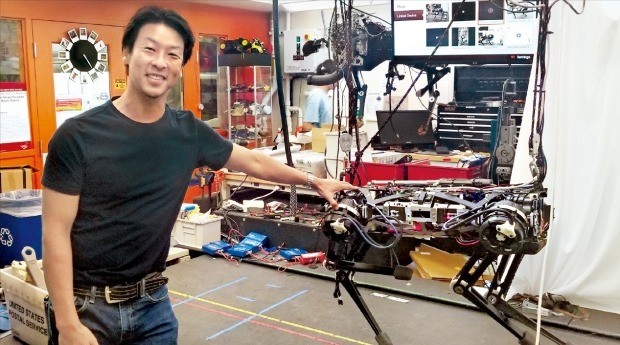
치타3를 개발한 주인공은 김상배 MIT 기계공학과 교수(43)다. 2001년 연세대를 졸업하고 미국 유학길에 오른 김 교수는 스탠퍼드대 박사과정 때 도마뱀처럼 벽을 기어오르는 로봇인 스티키봇(Stickybot)을 개발해 주목받기도 했다. “어릴 때부터 무엇이든 만드는 게 좋았다”는 그는 이제 세계가 주목하는 로봇공학자가 됐다. 미국 뉴욕에서 지난 1~4일 열린 ‘2018 한·미과학기술학술대회(UKC)’에서 기조연설을 한 김 교수를 케임브리지 MIT 연구실에서 만났다.
▶치타3 로봇은 시각 센서가 없는 로봇으로 소개됐습니다. 그렇게 개발한 이유가 있나요.
“치타3에도 카메라를 달 수 있습니다. 정교한 작업을 할 때는 시각센서가 필요합니다. 하지만 걷거나 뛸 때 센서를 쓰면 계산이 필요하기 때문에 동작이 느려집니다. 빨리 뛸 수 없지요. 그래서 액추에이터(구동계)와 알고리즘을 통해 발의 촉각만으로 20분의 1초 만에 판단하고 발을 내딛게 개발했습니다. 최고 시속 21㎞로 달릴 수 있습니다. 일본 후쿠시마 원자력발전소 사고 현장에선 방사선 때문에 센서가 순식간에 고장났습니다. 이 같은 사고 현장이나 야간 및 조명이 없는 곳에서도 치타3는 작업할 수 있습니다.”
▶치타 로봇 개발은 언제 시작했습니까.
“2010년 시작했고 지금까지 100억원은 투입했을 겁니다. 제가 하는 중요한 일이 정부와 기업에서 연구비를 따오는 거예요. 치타3에는 인텔 i7 프로세서가 17개 들어있습니다. 다음 버전엔 손을 달려고 합니다. 그 손은 사람 손 모양 리모컨으로 움직이게 할 겁니다. 인간 작업자가 리모컨을 통해 현장과 똑같은 감각을 느낄 수 있도록 하는 게 목표예요. 내년께면 치타 로봇이 문을 열고 들어가 냉장고에서 뭘 꺼내오는 게 가능할 겁니다.”
▶치타 로봇은 어떤 일에 쓰일 수 있을까요.
“2~5년 안에 공장, 발전소 등에서 설비 안전 등을 점검할 수 있을 겁니다. 예를 들어 파이프라인이 긴 화학공장에서는 사람이 돌아다니면서 파이프 부식 여부를 일일이 확인하고 있습니다. 그런 작업을 대체할 수 있겠지요. 상하수도도 마찬가지입니다. 물건 배송에도 쓰일 수 있고요. 무인자동차가 상용화되면 무인차가 정차하면 배달지 문 앞까지 배송품을 갖다 놓는 걸 치타가 할 수 있을 겁니다.”
▶왜 로봇을 개발할 생각을 했습니까.
“어릴 때부터 뭘 만드는 게 좋았습니다. 항상 조립 장난감인 레고를 갖고 놀았고 뭔가 만들고, 분해하고, 고장 난 걸 고치고 그랬죠. 제가 만든 걸 다른 누군가가 좋아하는 게 기뻤습니다. 고교 3학년 때까지는 거의 공부도 안 하고 무선으로 조종하는 RC카를 만들고 그랬습니다. 그런 경험이 대학원에서 연구할 때 큰 도움이 됐어요.”
▶그래서 전공도 기계공학으로 정했군요.
“네, 14살 때 기계공학과를 가겠다고 맘먹었죠. 하지만 막상 대학에서 수업만 듣다 보니 답답하더라고요. 그래서 대학 4학년 때인 2000년 솔루셔닉스라는 스타트업(신생 벤처기업)에 들어갔습니다. 4명이 막 창업했을 때였는데 3차원(3D) 스캐너를 첫 제품으로 제작했습니다. 그리고 프로덕트 디자이너가 되겠다는 꿈을 갖고 미국에 왔죠.”
▶스탠퍼드대 석·박사 과정과 하버드대 박사후과정을 거쳐 MIT 교수가 됐습니다. 모두 한국인이 선망하는 대학들입니다.
“실은 연세대 졸업할 때 학점이 좋지 않아 학교에서 MIT 추천서도 써주질 않았습니다. 10곳에 지원했는데 겨우 두 군데 붙었죠. 그중 하나가 스탠퍼드였습니다. 아마도 스타트업에서 일하고 3D 스캐너를 개발한 이력 덕에 합격한 것 같습니다. 스탠퍼드는 스타트업 문화에 익숙하니까요.”
▶목표와 달리 창업 대신 교수의 길을 선택했네요.
“2006년 스탠퍼드대 박사과정 때 스티키봇과 함께 개발한 접착 패드를 갖고 2008년 졸업할 무렵 스타트업을 창업했습니다. 한쪽으로 힘을 가하면 사람 몸무게를 지탱할 정도로 단단히 부착되지만, 다른 방향에서 당기면 쉽게 떨어지는 세계 최초의 ‘방향성 접착제(directional adhesive)’였습니다. 벤처캐피털을 만났지만 펀딩을 받진 못했습니다. 시장이 없다는 겁니다. 그때 ‘나는 시장보다는 리서치에 맞는 사람이구나’라는 생각이 들더군요. 마침 MIT에서 교수를 뽑고 있었습니다.”
▶치타 로봇을 개발할 때 어려운 점은 무엇입니까.
“알고리즘입니다. 균형잡는 것을 예로 들면 사람은 ‘넘어지지 않게 조심해’라고 말하면 끝인데, 로봇에 적용하기는 매우 어렵습니다. 사람들이 인공지능(AI)이 이세돌을 이겼다고 충격을 받았는데, 바둑은 정말 정량화가 잘되기 때문입니다. 하지만 ‘넘어지지 않는다’는 것은 수많은 상황이 있어 정량화하기 어렵습니다. 결국 최적화의 얘기인데 현존하는 알고리즘은 정량화 지표가 없으면 작동하지 않습니다. 부딪치지 않고 움직이는 자동차를 개발하는 건 쉽습니다. 거리를 일정하게 유지하게 하면 됩니다. 하지만 다른 차들 사이에서 아무 문제를 일으키지 않는 건 쉽지 않아요. 즉 다른 차량 운전자를 놀라게 하고 화나게 하거나 혹은 교통체증을 일으키지 않게 하는 건 매우 어렵습니다. 사람들이 쉽게 하는 건 오히려 정량화가 잘 안 되지요.”
▶치타 같은 로봇을 보면 걱정도 됩니다. AI가 인간을 넘어설 수 있을까요.
“지금 기술이 발전하면 그렇게 된다는 건 거짓말입니다. 물론 100년 뒤엔 모르겠지만요. AI가 인간을 이기려면 지금의 수학과 컴퓨터 프로그래밍이 아니라 완전히 새로운 방식이 나와야 합니다. 선형적으로 발전해서는 안 됩니다. 어떤 방식일지 학계에선 현재 아무런 아이디어가 없는 상태지요. 많은 사람이 컴퓨터가 사람만큼 똑똑하냐고 묻는데, 잘못된 질문입니다. 사람의 지능은 하나의 잣대로 평가할 수 없습니다. 물리학 용어로 수많은 차원(dimension)이 있죠. 알파고가 이세돌을 바둑으로 이겼지만, 이세돌보다 똑똑할까요? 바둑은 모르겠지만 설거지를 할 수 있습니까? 로봇과 AI로선 설거지가 훨씬 힘듭니다. 이세돌을 이긴 알파고는 바둑인 줄도 모르고 두는 알고리즘일 뿐입니다.”
▶로봇을 개발하는 교수님의 꿈은 무엇입니까.
“로봇이 사람에게 도움이 됐으면 좋겠습니다. 일자리를 대체하기보다는 인간이 하기에 위험한 일, 어려운 일을 대신하는 것이죠. 예를 들어 재난이 발생했을 때 사람을 대신해 로봇이 작업할 수 있었으면 합니다. 로봇은 인간의 삶을 편하게 하고 재미있게 할 수도 있지만 앞으로 노동력이 부족해지는 고령화 사회에선 필수 기술이 될 겁니다.”
▶MIT의 연구 분위기는 어떻습니까. 한국과 다른 점이 있다면요.
“새로운 아이디어에 대한 지원이 훨씬 좋습니다. 한국은 나이와 학벌, 교수·제자 간의 상하관계 등 여러 가지 이유에서 막혀있다면 미국인은 훨씬 진취적이지요. 아마 다(多)민족국가이고 다양성을 추구해왔다는 점 때문에 그렇지 않을까 합니다. 그 덕분에 새 아이디어가 많이 나오고 자유 경쟁이 이뤄집니다. ”
▶교수님은 젊은 나이에 많은 걸 이뤘습니다. 비결이 있습니까.
“제가 좋아하는 것, 잘하는 것을 좇았습니다. 학교에서도 논문 편수라든지, 학점이라든지 그런 것은 무시했습니다. 하지만 좋아하는 것을 정말 열심히 했고, 그것을 잘하기 위해 집중했습니다. 과학자를 꿈꾸는 학생들이 자신이 좋아하는 것, 잘할 수 있는 것, 그리고 사회에 필요한 것 이 세 가지의 공통분모를 잘 찾았으면 좋겠습니다. 그건 평생 찾아야 하는 것입니다. 저도 계속 그렇게 찾고 있습니다.”
■김상배 교수는
대학원 때 벽 오르는 로봇 개발… 타임誌 '최고 발명품'
1975년 서울에서 태어나 보성고를 나왔다. 2001년 연세대 기계공학과를 졸업한 뒤 미국 스탠퍼드대(2002~2008년)에서 석·박사 학위를 받았다. 연구가 아니라 영어 때문에 큰 어려움을 겪었다는 그는 논문 작성이 가장 힘들었다고 했다.
박사과정 때인 2006년 개발한 스티키봇(Stickybot)이 시사주간지 타임이 뽑은 ‘올해 최고의 발명품 44’에 선정돼 큰 주목을 받았다. 스티키봇은 도마뱀처럼 벽을 타고 오르는 로봇이다. 촉각으로 움직이는 로봇인 치타2, 치타3에 들어가는 액추에이터와 알고리즘을 설명한 논문은 2016년 국제전기전자공학회(IEEE)·미국기계협회(ASME)가 주는 최우수논문상을 수상했다.
△1975년 서울 출생△보성고·연세대 기계공학과(2001년) 졸업, 미국 스탠퍼드대 기계공학 석·박사(2002~2008년), 하버드대 박사후과정 △2000년 3차원(3D) 스캐너업체 솔루셔닉스 창업 멤버 △2007년 국제전기전자공학회(IEEE) 최우수 학생 논문상 △2009년~ MIT 교수 △2013년 미 국방부 고등연구계획국(DARPA) 젊은과학자상(YFA)
케임브리지=김현석 특파원 realist@hankyung.com
-
기사 스크랩
-
공유
-
프린트


!['매그니피센트7' 실적 먹구름…지수 혼조 [뉴욕증시 브리핑]](https://timg.hankyung.com/t/560x0/photo/202404/01.36519299.1.jpg)






![AI에게 이렇게 말해보세요 "심호흡 한번 하고 문제를 해결해보자" [WSJ 서평]](https://timg.hankyung.com/t/560x0/photo/202404/01.36512304.3.jpg)