KAIST '휴보', 미국·일본·독일 제치고 세계 최고 '재난 로봇' 등극
차량 탈출 등 8개 과제 44분 완수…2위 플로리다대보다 6분 빨라
결선 오른 24개 팀 중 10곳, 한국산 로봇·부품 사용 '눈길'

2013년과 2014년 예선을 거친 6개국 24개팀이 5일부터 미국 캘리포니아주 포모나 전시장에서 열린 결선에 참여했다. 우승 상금만 200만달러(약 22억원) 규모. 미국은 대회를 위해 1000억원 넘게 투자했다. DRC가 ‘로봇 올림픽’이라고 불리는 이유다. KAIST 휴보는 미국 일본 독일 등 로봇 강국의 팀들을 물리치고 우승을 차지해 세계 최고의 재난 수습 로봇이라는 명성을 얻게 됐다.
○첫날 고전 딛고 이룬 역전 우승

휴보는 첫날인 5일 드릴로 벽을 뚫는 과정에서 드릴이 손상돼 시간을 지체했다. 눈물을 머금고 과제를 포기했다. 이 때문에 휴보의 중간 순위는 6위에 그쳤다. 6일 재도전에 나선 휴보는 8개 과제를 실수 없이 모두 마쳤다. 소요시간은 44분28초. 8개 과제를 모두 해낸 3개팀의 로봇 중 가장 빨랐다. 2위는 미국 플로리다대 인간기계연구소(IHMC)의 ‘러닝 맨(50분26초)’, 3위는 카네기멜론대 ‘타르탄 레스큐’ 팀의 ‘침팬지(55분15초)’가 차지했다.
함께 출전한 서울대 팀의 ‘똘망 SNU’와 국내 로봇 기업인 로보티즈의 ‘똘망’은 각각 4개 과제(소요시간 59분33초)와 3개 과제(30분23초)를 수행하는 데 그치며 12위와 15위에 머물렀다. 한국계 로봇공학자로 유명한 데니스 홍 미 UCLA 교수 팀의 ‘토르’는 27분47초 동안 3개 과제를 성공시켜 똘망 SNU에 이어 13위에 랭크됐다.
○한국 로봇 우수성 입증
이번 대회에 출전한 24개팀 가운데 무려 10개팀이 한국에서 개발한 로봇 본체와 부품을 사용해 눈길을 끌었다. 미국의 유명 로봇기업인 보스턴 다이내믹스의 ‘아틀라스’를 이용하는 팀(7개팀)보다 많다.
최종 3위에 오른 카네기멜론대 타르탄 레스큐 팀과 라스베이거스 네바다주립대(UNLV) ‘DRC-Hubo’ 팀도 KAIST의 휴보 모델을 채택했다. DRC-Hubo 팀 역시 이번 대회에서 6개 과제를 57분41초에 수행해 8위에 오르는 좋은 성적을 거뒀다. 4위(7개 과제·34분)를 차지한 독일 본대학 ‘님브로 레스큐’ 팀은 로보티스의 부품을 재조립해 사용하기도 했다.
이호기 기자 hglee@hankyung.com
-
기사 스크랩
-
공유
-
프린트
-
1
'짜릿짜릿' 손맛까지 잡은 가상현실…촉각 느끼는 로봇도 나온다
미래 인공지능(AI) 시대를 한 단계 더 진보시킬 기술로 햅틱(haptic·촉각)이 부상하고 있다. 키보드와 마우스, 조이스틱, 터치스크린, 웨어러블 슈트·장갑 등에 진동을 발생시켜 가상현실(VR)에서 촉감을 전달하는 기술인 햅틱은 ‘만지는’이라는 뜻의 그리스어 형용사 ‘haptesthai’에서 유래됐다. 진입 장벽이 높아 뚜렷한 글로벌 기술 리더가 없는 만큼 대한민국이 공략하면 주도권을 쥘 수 있다는 분석이 나온다.○“사람 피부 적용한 로봇 곧 나온다”국내 로봇 햅틱 연구개발(R&D) 권위자인 김정 KAIST 기계공학과 교수는 19일 한국경제신문과의 인터뷰에서 “인간 촉각과 감각 전달 원리를 모방해 인간처럼 촉각을 느낄 수 있고 상처 치유도 가능한 로봇 피부를 개발하고 있다”고 말문을 열었다. 세계에서도 보기 드문 햅틱 연구자인 김 교수가 수많은 분야 중 햅틱에 주목한 이유는 촉각 기술에 따라 로봇의 쓰임새가 무궁무진해서다. 그는 “현재 햅틱은 손가락에서 구현하는 데 그치지만 곧 로봇 몸체 전체를 덮는 ‘대면적 로봇 피부’로 연구가 확장될 것”이라고 강조했다.로봇 피부 연구의 핵심인 햅틱은 다양한 분야에서 사용이 늘어나는 추세다. 우주 분야에선 유럽우주국(ESA)이 국제우주정거장(ISS)에서 지구상 로봇을 조종하면서 촉각을 느끼는 햅틱을 도입하는 실험에 성공했다. 자동차 분야에서는 전면 디스플레이 화면을 보지 않고 촉각으로만 가상 버튼의 위치를 파악해 조작할 수 있는 ‘헤드업 햅틱 디스플레이’ 적용을 앞두고 있다. 의료 분야에선 수술 보조 로봇을 통해 환부와 장기 상태를 의료진이 수술 조이스틱으로 느끼는 햅틱이

-
2
가상현실·MRI로 환각 유도…뇌 속 'GPS 세포' 움직였다
자신이 처한 위치와 상황에 맞지 않는 황당한 발언을 하는 것을 두고 정치권 등 세간에서는 ‘유체이탈 화법’이라고 말한다. 유체이탈을 학술적으로 표현하면 자기상환시(자기 위치 환각)라고 한다. 자신을 외계에서 마치 제3자처럼 느끼는 환각인데, 주로 정신질환자들에게서 나타나는 증상이다.인간의 뇌엔 자신이 처한 위치를 인식하는 위치정보시스템(GPS) 기능을 담당하는 세포가 있다. 주로 해마에 분포하는 격자세포다. 사람이 특정 장소로 이동하는 동안 그 경로를 따라 뇌 속 격자세포들이 차례로 활성화된다. 격자세포는 해당 공간(좌표) 내에서 일어난 사건들을 기억할 때도 중요한 역할을 하는 것으로 알려졌다.문혁준 한국과학기술연구원(KIST) 바이오닉스연구센터 선임연구원 연구팀은 올라프 블랑케 스위스 로잔연방공대 교수 연구팀과 함께 다중감각 가상현실(VR) 기술 등을 이용해 자기상환시를 유도하고, 이때 나타나는 뇌 속 격자세포 변화를 관측하는 데 성공했다고 19일 밝혔다. 기존에 격자세포 연구는 두개골을 열고 전극으로 세포를 자극해 활성을 연구하는 방법밖에 없었다.연구팀은 인체를 대상으로 자기공명영상(MRI) 호환 VR 등을 사용해 여러 위치와 방향으로 자기상환시를 유도했다. MRI 호환 VR은 MRI 스캔을 하면서 VR 효과를 주는 기술이다. 이 과정에서 격자세포의 변화를 분석한 다음 이를 각 피험자의 환각 경험 설문조사 결과와 비교·대조했다. 설문 결과는 MRI 신호 데이터와 일치했다. 환각을 느꼈다고 응답한 피험자의 경우 VR 조작 수준과 격자세포 활성에서 유의미한 정비례 관계가 나타났다. 임상시험은 스위스 느샤텔병원이 담당했다.KIST 관계자는 “여러 신
-
3
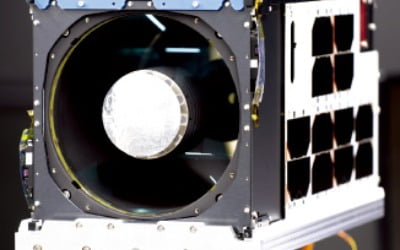
아시아 최초로 해냈다…NASA '최고 등급' 받은 한국 회사
인공위성으로 확보한 이미지는 국방뿐 아니라 농업, 금융 등 산업 전반에서 활용한다. 특정 대륙에 농작물 작황이 어느 수준인지를 위성으로 파악해 곡물값을 예측하거나, 특정 지역 유류창고에 기름이 차 있는 정도를 분석할 수도 있다. 이런 데이터는 증권·금융업계의 파생상품 거래에 활용된다.국내 초소형 인공위성 개발 스타트업 나라스페이스테크놀로지가 미국 항공우주국(NASA)으로부터 기술력을 인정받았다. 19일 나라스페이스에 따르면 이 회사는 지난달 NASA로부터 저궤도 비행기술 인증(Qualified LEO)을 획득했다. 혹독한 우주 환경에서도 위성의 통신과 전기 계통, 자세제어 장치 등이 문제없이 작동한다는 NASA의 검증을 받은 것이다. 아시아 기업 가운데 최초다.박재필 나라스페이스 대표는 “위성업계의 최신 트렌드는 100㎏ 이하 초소형 위성으로 군집을 형성해 임무를 수행하는 것”이라며 “5년 내 초소형 위성 100개 이상을 발사해 재난·재해와 환경 감시, 국방, 금융, 스마트시티 등에서 활용할 각종 데이터를 수집할 것”이라고 말했다.이 스타트업은 지난해 온보드컴퓨터 부문에서 NASA로부터 기술준비 최고 등급인 9단계(TRL-9)를 인증받기도 했다. 온보드컴퓨터는 위성의 두뇌 역할을 하는 장치로 각 부품에 명령을 내리고 제어한다.내년 상반기 이 회사는 자체 개발한 두 번째 초소형 인공위성 옵서버1B를 스페이스X의 팰컨9 로켓에 실어 발사할 계획이다. 지난해엔 가로·세로 20㎝, 높이 40㎝, 무게 25㎏의 옵서버1A(사진)를 팰컨9에 실어 발사했다. 지표면 사진을 찍어 분석하는 초소형 위성은 해상도가 성능의 바로미터다. 업계에선 1m 안팎의 해상도를 지녀야 유의미한


![넷플릭스, 가입자 순증 꺾였다…악재 쏟아진 기술주 [글로벌마켓 A/S]](https://timg.hankyung.com/t/560x0/photo/202404/B20240419072033320.jpg)


![[단독] "경영보다 돈"…아워홈 매각 손잡은 남매](https://timg.hankyung.com/t/560x0/photo/202404/AA.36472890.1.jpg)