DGIST, 사람 손처럼 정교한 인간형 로봇핸드 핵심 기술 개발
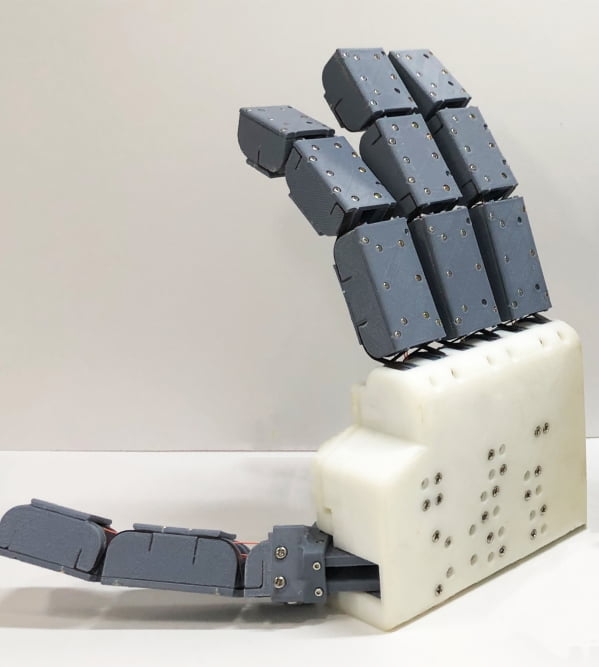
최근의 산업현장에서는다양한 강성의 물체를 움켜쥐거나 조립하는 등의 고도의 작업을 위해 로봇핸드가 주로 사용된다. 이러한 정밀한 로봇핸드 제어를 위해 구름베어링(rolling bearing) 기반의 볼베어링 회전 조인트가 주로 사용되지만 가격이 비싸고 조립이 까다로우며 외부 충격에 고장이 나기 쉬워, 이를 대체하기 위한 다양한 유연 조인트가 개발되고 있다.
윤동원 교수 연구팀은 기존의 유연구조 로봇핸드의 약한 강성을 보강하고자 새로운 구조의 로봇핸드를 고안했다.

특히 모터의 제어가 없는 부족구동 와이어 메커니즘으로 다양한 형상의 물체를 잡아 최대 4kg 무게까지 버틸 수 있음을 확인했다.
연구팀의 성과는 유연한 재질과 독특한 구조를 활용해 필요한 방향의 강성을 키워 우수한 파지능력을 구현하고, 유연구조를 활용해 높은 충격흡수율을 동시에 구현한 점이 특징이다.
특히 기존의 베어링기반 로봇핸드처럼 값비싼 소재와 복잡한 공정이 필요 없어 제작비 절감에 큰 기여를 할 것으로 기대된다.
융동원 DGIST 로봇공학전공 교수는 “기존 로봇핸드에 비해 제작이 쉽고 가격 경쟁력이 있으며, 유연힌지의 장점을 가지면서 가반하중을 증대시켜 실제 산업현장에 적용이 용이하다”며 “다양한 산업제조현장, 서비스 로봇 등에 상용화될 수 있도록 후속연구를 진행하겠다”고 말했다.
이번 연구 결과는 로봇분야의 최상위 국제학술지 ‘소프트 로보틱스(Soft Robotics)’에 3월 5일자 온라인으로 게재됐다. DGIST 로봇공학전공 양준모 석박사통합과정생과 김정석 석사졸업생이 공동1저자로 참여했고, 한국연구재단의 신진연구지원사업으로 수행됐다고 DGIST는 밝혔다. 오경묵 기자 okmook@hankyung.com
-
기사 스크랩
-
공유
-
프린트
-
1
한은, 금리동결…성장률 전망 3.0%→4.0%, 물가 1.3%→1.8%(종합2보)
"경제 회복세 강하지만 불확실성 잠재…물가상승 압력 크지 않아" 한국은행 금융통화위원회(이하 금통위)가 현재 연 0.5%인 기준금리를 유지하기로 27일 결정했다. 작년 7월, 8월, 10월, 11월과 올해 1월, 2월, 4월에 이어 여덟 번째 '동결'이다. 기준금리 동결로 미국 연방준비제도(연준·Fed) 기준금리(3월 0.00∼0.25%로 인하)와 격차는 0.25∼0.5%포인트(p)로 유지됐다. 금통위는 통화정책방향 의결문에서 "국내 경제의 회복세가 강해지고 물가가 당분간 높은 오름세를 이어갈 것으로 보이나, 코로나19 전개와 관련한 불확실성이 잠재해 있고 수요 측면의 물가상승압력이 크지 않을 것으로 전망되므로 통화정책의 완화기조를 유지해 나갈 것"이라고 밝혔다. 금통위는 국내 경제에 관해 "회복세가 확대됐다. 수출이 호조를 지속하고 설비투자가 견조한 회복세를 이어갔으며, 민간소비도 부진에서 점차 벗어나는 모습이다. 고용 상황도 취업자수 증가폭이 확대되는 등 개선되는 움직임"이라며 "앞으로 국내경제는 수출과 투자 호조, 민간소비 개선 등에 힘입어 회복세가 강해져 올해 중 GDP(국내총생산) 성장률은 지난 2월 전망치(3.0%)를 큰 폭으로 상회하는 4% 내외 수준으로 예상된다"고 분석했다. 한은은 이날 금통위 회의 직후 발표한 수정 경제 전망에서 올해 실질GDP 성장률 전망치를 기존 3.0%보다 1%포인트(p)나 높은 4.0%로 제시했다. 내년 성장률도 2.5%에서 3.0%로 0.5%포인트 올려 잡았다. 아울러 금통위는 "소비자물가 상승률이 석유류 및 농축수산물 가격 오름세, 서비스 가격 상승폭 확대 등으로 2%대 초반으로 크게 높아졌으며, 근원인플레이션율(식료품·에너지 제외 지수)은 1%대 초반으로 상당폭 상승했다. 일반인 기대인플레이션율은 2%대 초반에서 소폭 높아졌다"며 "올해 중 소비자물가 상승률은 지난 2월 전망치(1.3%)를 상당폭 상회하는 1%대 후반 수준을, 근원인플레이션율은 1%대 초반을 나타낼 것"이라고 예상했다. 이에 따라 한은은 올해 소비자물가 상승률 전망치를 1.3%에서 1.8%로 상향조정했다. 내년 상승률은 1.4%로 유지됐다. 앞서 금통위는 신종 코로나바이러스 감염증(코로나19) 충격으로 경기 침체가 예상되자 지난해 3월 16일 '빅컷'(1.25%→0.75%)과 5월 28일 추가 인하(0.75%→0.5%)를 통해 2개월 만에 0.75%포인트나 금리를 빠르게 내렸다. 이후 1년 넘게 완화적 통화정책이 이어지면서 최근 인플레이션(물가상승), 자산 가격 버블(거품) 등 부작용에 대한 우려가 커지고 있지만, 일단 금통위는 지금 시점에서 당장 금리를 올려 경기를 위축시킬 수 없다고 판단한 것으로 해석된다. 수출과 투자는 기대 이상으로 좋지만, 민간 소비 등은 아직 회복세가 뚜렷하지 않기 때문이다. 이날 금통위를 앞두고 학계·연구기관·채권시장 전문가들도 대부분 경기 방어 차원에서 금통위원들이 만장일치로 기준금리 동결을 결정할 것으로 점쳤다. 성태윤 연세대 경제학부 교수는 "대면 소비 등에 여전히 어려움이 있기 때문에, 현재 경기 상황만 보자면 아직 금리를 인상할 때는 아니다"라고 말했다. 김소영 서울대 경제학부 교수는 "이번에는 기준금리가 동결되겠지만, 4% 가까운 성장이 예상되는 가운데 기준금리를 계속 0.5%에 묶어 두는 것은 한은 입장에서도 부담스러울 수 있다"며 "미국이 테이퍼링(자산매입 축소)은 올해 안에, 금리 인상은 내년이나 그 이후에 할 가능성이 있는데 한은은 미국의 추이를 봐가며 금리 인상 시점을 결정할 것"이라고 전망했다. 조영무 LG경제연구원 연구위원은 "미국 보다 우리가 늦게 기준금리를 올리는 게 맞다"며 "미국이 서두른다면 올해 하반기 테이퍼링에 들어가고, 내년말이나 내후년에 기준금리를 인상할 것으로 본다"고 말했다. /연합뉴스

-
2
전주 '돼지카드' 발행 규모 월 150억원으로 축소…"예산 부족"
전북 전주시가 운용하는 지역사랑상품권인 '돼지카드' 발행 규모가 줄어든다. 27일 전주시에 따르면 다음 달부터 돼지카드 월 발행 규모가 150억원으로 제한된다. 이번 결정으로 이용자들은 발행 한도를 넘는 금액을 충전할 수 없게 됐다. 시는 지역 내 소비 촉진과 경제 활성화를 위해 지난해 11월부터 선불 충전식 상품권인 돼지카드를 발행했다. 개인당 월 30만원을 충전해 쓰고, 이용 금액의 10%를 현금으로 돌려주는 방식이다. 반년 만에 누적 가입자가 15만6천 명을 넘어서는 등 순항했으나 그에 따른 캐시백 규모도 늘면서 예산 소진이 가팔라졌다고 시는 설명했다. 시는 발행 규모를 축소했지만, 기존 혜택과 개인당 충전 한도는 유지한다고 밝혔다. 시 관계자는 "돼지카드는 코로나19로 위축된 지역경제 활성화에 분명 기여하고 있다"면서 "안정적 운영을 위해 부득이하게 월 발행금액을 제한하게 됐다"고 전했다. /연합뉴스
-
3
'수출효자' 포도 1∼4월 수출액 지난해보다 50% 급등
작년 수출액 역대 최고…장기저장기술 도입 등 영향 포도 수출액이 지난해 역대 최고를 달성한 데 이어 올해 들어서도 50% 가까이 증가한 것으로 나타났다. 농림축산식품부는 지난해 포도 수출은 전년보다 34.7% 증가한 3천100만 달러로 역대 가장 높았으며 올해도 1∼4월 중 지난해 같은 기간보다 49.5% 늘어난 722만7천 달러를 수출했다고 27일 밝혔다. 농식품부는 "지난해 긴 장마와 태풍으로 일조량이 부족해 수출규격품 출하 시기가 지연되고 신종 코로나바이러스 감염증(코로나19) 사태가 장기화하는 등 어려움이 있었지만, 장기저장기술을 도입하고 다양한 판촉 행사를 벌여 악조건 속에서도 역대 최고 실적을 달성했다"고 설명했다. 특히 포도 수출의 88.7%를 차지하는 샤인머스캣의 저장기간은 최대 3개월이지만, 수확 후 예냉 처리와 저장 방법 개선을 통해 저장기간을 5개월까지 늘렸다. 이를 통해 주 수출 시기(11월∼다음 해 1월)보다 2개월 더 연장된 3월까지 수출이 가능해지고 수출단가도 30% 이상 오르며 농가소득을 향상하는 데 기여했다. 중국에서는 한국산 샤인머스캣이 프리미엄급으로 인식돼 백화점이나 고급매장에서는 1송이(500g)당 5만4천원에 팔린다. 베트남은 높은 경제성장으로 소비자 구매력이 강해져 선물용으로 샤인머스캣을 사는 경우가 늘며 최대 수출국으로 떠올랐다. 농식품부는 최근 샤인머스캣 재배면적이 크게 늘면서 가격 하락 우려가 있지만, 장기저장기술과 수출 활성화를 통해 극복할 수 있을 것으로 보고 한국포도수출연합, 경북농업기술원과 공동으로 장기저장기술 매뉴얼을 제작해 전국에 보급하기로 했다. 농식품부 관계자는 "장기저장기술 보급·확대, 체크프라이스(최저수출가격) 도입, 엄격한 품질관리와 홍보마케팅 등을 통해 프리미엄 한국산 포도 수출이 더욱 확대될 수 있도록 계속 노력하겠다"고 말했다. /연합뉴스











![[오늘의 arte] 독자 리뷰 : 당신의 미술 취향은 무엇인가요](https://timg.hankyung.com/t/560x0/photo/202404/AA.36523699.3.jpg)