안전거리 확보하면 사고 '뚝'…100m 앞 위험 감지하는 센서 나왔다
도로교통법 제19조(안전거리 확보 등) 1항은 ‘모든 차의 운전자는 같은 방향으로 가고 있는 앞차의 뒤를 따르는 경우에는 앞차가 갑자기 정지하게 되는 경우 그 앞차와의 충돌을 피할 수 있는 필요한 거리를 확보해야 한다’고 적고 있다.
안전거리는 주행속도는 물론 도로 상황과 기상 상태 등 여러 외부 요인에 따라 달라진다. 어떤 상황에서라도 앞차와의 간격이 뒤차의 정지거리보다 항상 넓어야 급작스러운 제동 시에 사고를 피할 수 있다.
이때 정지거리는 공주거리와 제동거리의 합으로 나타낼 수 있다. 공주거리란 위험한 상황이 발생한 직후 운전자가 이를 인지하고 대응하는 데 걸리는 거리를 일컫는다.
제동거리는 운전자가 브레이크를 밟고 나서 차가 완전히 정지할 때까지 이동한 거리다. 정지거리도 주행 속도에 따라 달라진다. 80㎞/h의 속력에서는 정지거리가 56m, 100㎞/h에서는 정지거리가 88m 정도 된다. 이는 급정거할 때의 정지거리를 산출한 것으로 안전거리는 이보다 넉넉하게 확보하는 것이 바람직하다.
도로교통공단은 안전거리를 쉽게 계산하기 위해 일반도로에서는 ‘속도계 숫자 빼기 15’, 고속도로를 주행할 때는 ‘속도계 숫자’만큼의 안전거리를 유지하라고 충고한다. 일반도로에서 50㎞/h로 달리고 있다면 앞차와의 간격을 35m 정도 유지하는 것이 안전하며, 고속도로에서 100㎞/h로 주행하고 있다면 안전거리를 100m 이상 확보하는 것이 안전하다는 얘기다.
위 공식이 절대적인 것은 아니며, 적정 안전거리는 도로 상황과 기상 상태 등에 따라 유동적이므로 주행속도를 고려해 안전거리를 충분히 유지하도록 해야 한다.
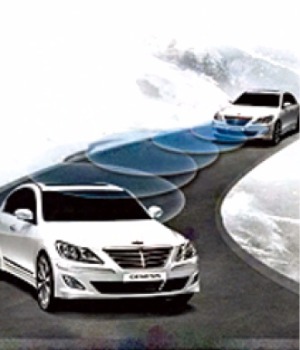
안전거리를 확보하기 쉽도록 도와주는 전자장치들도 속속 개발되고 있다. 레이더 센서를 사용해 앞차와의 적정거리를 유지해주는 스마트크루즈컨트롤(SCC)이나 차량 앞부분의 카메라를 사용해 앞쪽 위험상황을 감지하는 전방 위험차량 경보시스템(FCW)이 대표적이다.
현대모비스는 기존 30만화소의 차량용 카메라에서 더 나아가 국내 최초로 100만화소 이미지 센서를 적용한 통합영상인식 전방 카메라 개발에 성공했다. 이를 통해 기존 전방 70m까지 영상인식이 가능하던 거리가 100m 이상으로 연장됐다. 앞차와의 안전거리 유지에 크게 도움이 될 것으로 기대된다.
현대모비스 기술연구소
-
기사 스크랩
-
공유
-
프린트
-
1
日 기시다, ‘생성형 AI 국제기구’ 설립 추진… AI 주도권 선점 나서
일본 정부가 생성형 인공지능(AI)에 관한 국제기구를 창설할 예정이다. 일본 정부가 글로벌 AI 규범을 먼저 마련해서 글로벌 거버넌스 주도권을 선점하겠다는 취지로 풀이된다.24일(현지시간) 일본 요미우리신문에 따르면 기시다 후미오 일본 총리가 다음 달 2일 프랑스 파리에서 개최되는 경제협력개발기구(OECD) 각료 이사회에 참석해 '생성형 AI의 국제 정치'를 주제로 연설할 예정이다. 일본은 OECD 각료 이사회 의장국이다. 각료 이사회의 주요 의제를 설정하고, 관련된 계획을 수립하는 등 주도적인 역할을 할 수 있다.기시다 총리는 이번 각료 이사회에서 '히로시마 AI 프로세스 프렌즈 그룹'이란 명칭의 AI 관련 국제 협력 기구에 대한 창설 계획을 밝힐 예정이다. 기시다 총리 연설문 초안에는 "AI는 인류 전체에 영향을 주는 혁신 기술로서 다양한 국가에서 공통된 인식 틀을 갖는 게 중요하다"며 "특히 가짜 뉴스와 같은 위험성과 싸우기 위해선 협력이 필요하다"고 강조했다.앞서 일본 정부는 지난해 5월 G7(주요 7개국) 정상회의 의장국으로서 '히로시마 AI 프로세스'를 주도한 바 있다. 주요 국가들과 첨단 AI 개발 조직과 관련한 국제 지침과 행동 규범을 합의를 성사했다. 올해는 OECD 회원국으로 대상을 확대했다. G7 주요국을 비롯해 한국, 싱가포르 등과 유럽연합(EU) 회원국이 동참할 전망이다. 총 40여개국을 참여시키는 게 일본 정부의 목표다.기시다 총리는 연설문 초안에 "프렌즈 그룹에 동참하게 되면 인류가 안심하고 쓸 수 있는 AI를 개발할 수 있는 길이 열린다"며 "일본 정부도 가짜 뉴스를 식별하기 위한 기술에 적극적으로 지원할 것"이라고 강조했다.

-
2
중소벤처기업부는 비수도권 엔젤투자 활성화를 위해 대구·경북 지역 엔젤투자허브를 경북에 구축한다고 25일 밝혔다. 중기부는 오는 6월까지 경북 경산시의 경북창조경제혁신센터 경산지점에 엔젤투자허브를 설치하고 운영에 들어할 계획이다. 지역 엔젤투자허브는 수도권에 몰린 엔젤투자를 완화하고 지역 단위의 초기 투자 생태계를 조성하기 위해 2021년부터 정부가 지방에 설치해 운영하고 있다. 2021년 충청권과 호남권을 시작으로 지난해 동남권에 구축했다. 이번이 네 번째다김주완 기자 kjwan@hankyung.com
-
3
"금은방보다 싸다"…편의점에서 '금' 사는 이유 있었네
금값이 오르자 비교적 가격이 저렴한 저중량 금을 모으는 '소금족'(小金族)이 늘고 있다. 편의점은 이들을 노려 카드형 골드바 등 이색 제품을 내놓고 있다.CU는 이달 1일 출시한 1g 카드형 골드바(11만3000원)가 이틀 만에 매진됐다고 25일 발표했다. 1.87g 상품(22만5000원)도 보름 만에 준비 수량이 모두 소진됐다.연령층으로 보면 30대가 가장 많이 구매했다. CU가 자체 앱 '포켓CU'를 통해 카드형 골드바를 구매한 고객을 분석한 결과, 30대가 전체의 41.3%를 차지했다. 40대(36.2%), 50대(15.6%), 20대(6.8%)가 그 뒤를 이었다.최근 금값이 비싸지면서 '금테크'에 나선 사람이 늘어난 영향이다. 한국조폐공사에 따르면 올 1분기 1g 이하 골드바 판매량은 전분기보다 68% 이상 증가했다. CU 관계자는 "편의점에서 판매하는 카드형 골드바는 정찰제이기 때문에 시세 대비 저렴하고, 금은방에 갈 필요 없이 가까운 점포에서 쉽게 구매할 수 있는 게 장점"이라고 했다.CU는 카드형 골드바 수량을 추가로 확보하고, 2g·4g·10g 등 중량이 높은 골드 상품도 내놓을 계획이다.이선아 기자 suna@hankyung.com