두부 옮기기부터 제품 포장까지 가능한 만능 로봇손 개발
-
기사 스크랩
-
공유
-
댓글
-
클린뷰
-
프린트
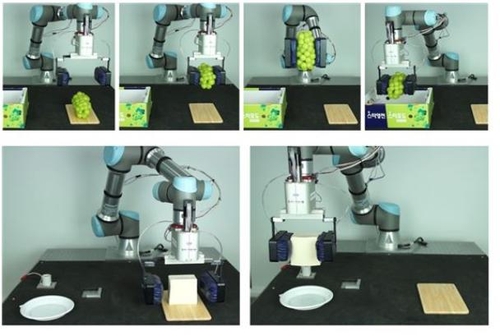
두부처럼 강도가 약한 식자재를 손상 없이 잡을 수 있을 뿐 아니라 요리, 서빙, 제품 포장·생산 등 서비스 분야까지 활용될 전망이다.
박찬훈 로봇메카트로닉스연구실장 연구팀이 개발한 그리퍼는 집게형과 흡입형 두 종류다.
집게형의 경우 두부처럼 부드럽고 푹신한 표면이 물체에 맞게 변형된다.
물체를 움켜쥔 이후에는 그리퍼 표면이 변형된 상태로 단단하게 유지돼 안정감이 생긴다.

코끼리가 코로 물체를 잡을 때 코끝 모양을 대상에 맞추는 것과 비슷한 원리다.
표면 굴곡이 심하고 좁은 공간에 놓인 다양한 물체를 운반할 수 있다.
박찬훈 실장은 "기존 그리퍼는 형태가 고정돼 있어 몇 가지 물체만 다룰 수 있지만, 이번에 개발한 그리퍼는 물체 형상에 맞게 그리퍼 표면이 변형돼 다양한 물체를 잡을 수 있다"며 "그리퍼 기술 혁신이 필요했던 언택트 서비스 분야에서 많이 활용될 것으로 기대한다"고 말했다.
/연합뉴스
-
1
12·3 비상계엄 사태를 수사하는 검찰이 계엄사령관을 맡았던 박안수 육군참모총장을 14일 피의자 신분으로 소환해 조사하고 있다.검찰 비상계엄 특별수사본부(본부장 박세현 서울고검장)는 이날 박 총장을 피의자 신분으로 불러 조사 중이다. 이에 앞서 검찰은 지난 8일 박 총장을 김용현(구속) 전 국방부 장관 사건의 참고인으로 조사한 바 있다.검찰은 이날 박 총장에게 포고령 포고 경위, 합동참모본부 지휘통제실 내 결심지원실(결심실)에서 윤석열 대통령 등과 논의한 내용 등을 확인하고 있는 것으로 전해졌다.박 총장은 모든 정치활동을 금한다는 등 위헌적 내용이 담긴 포고령 제1호를 포고했다. 하지만 윤 대통령의 담화 발표를 보고 계엄이 선포된 사실을 알았고, 자신의 명의로 나온 포고령도 직접 작성하지 않았다는 입장이다.박 총장은 지난 4일 새벽 국회에서 계엄 해제 요구안이 통과되자, 윤 대통령, 김 전 장관 등과 함께 국방부 지하의 합참 결심실에서 회의한 사실이 알려져 '제2의 계엄을 논의한 것 아니냐'는 의혹이 제기된 상태다.홍민성 한경닷컴 기자 mshong@hankyung.com

-
2
"감옥 갈 사람들이 참 많은데 왜 윤석열 대통령을 탄핵하는지."뮤지컬 배우 차강석이 14일 국회의사당서 진행된 보수단체 집회에 참석해 자신의 유튜브채널 차강석TV에서 라이브 방송을 진행하며 이렇게 말했다. 그는 윤석열 대통령이 계엄을 선포한 직후 "간첩이 너무 많다 다 잡아 처벌해달라"는 글을 올렸다가 뭇매를 맞았다.이후 자신의 사회관계망서비스(SNS)에 윤석열 대통령의 비상계엄 선포를 옹호하는 글을 올렸다가 하차한 배우 차강석이 14일 국회의사당 보수단체 집회에 참석해 이렇게 말했다.그는 당시 "최근 간첩 이슈로 예민해져 있던 차에 반국가 세력 척결에 대해 기대심에 가득 차 글을 올리게 됐다"면서 "저급하고 과격한 표현을 사용한 부분은 매우 죄송하게 생각한다"고 사과했다. 하지만 작품에서 하차당하고 강연 일도 그만두게 된 것으로 전해졌다.차강석은 윤 대통령 탄핵소추안 표결을 앞두고 보수 유튜브 채널 가로세로연구소가 주최한 '탄핵소추 의결 저지 국민대회'에 참석해 "저쪽에 분명히 간첩이 있다고 생각한다"며 "저는 선동에 엄청 취약했다. 배우들은 감성에 조금 예민해서 사람들이 하는 말을 잘 귀담아들어 주고, 공감하다 보면 휘둘릴 수 있다"고 말했다.이어 "제가 고등학교 때 어느 단체에 가입돼 있으신 선생님이 교실에 들어와서 '선생님이 미안하다. 내가 너희들의 먹거리를 책임질 수 없어서 내가 이렇게 촛불밖에 들 수 없다'고 말했다"면서 "그 선생님 미국산 소고기 잘 드시고 계실거다. 광우병 걸린 사람을 본 적 없다"고 목소리를 높였다.차강석은 또 "최근 우리나라에서 예산이 없어

-
3
14일 광화문에서 열린 ‘탄핵 반대’ 보수단체 집회 참가자들 사이에선 탄핵안이 오후 5시 가결되자 침묵이 흘렀고, 이내 분노가 터져나왔다. 광화문부터 대한문까지를 채운 20만 명(경찰 추산 3만 명)의 시민들은 ‘대통령님은 부정선거 꼭 밝히세요’ ‘배신자 국힘(국민의힘) 다 사퇴하라’ ‘사기 탄핵은 무효’라고 외쳤다. 경기 구리시에서 왔다는 30대 여성 권모 씨는 “대한민국 미래가 암울해졌다”며 울먹였다.윤 대통령이 걱정돼 광화문 집회에 왔다는 70대 박모 씨는 “정치 경험이 없는 대통령을 두고 민주당은 협치해도 모자랄 판에 정부가 전혀 일할 수 없게 만든 게 문제”라고 소리쳤다. 그는 “40대 교사인 딸과는 생각이 달라 말을 섞지 않는다”고도 했다. 광화문 보수집회 현장에선 여전히 윤 대통령이 주장하는 ‘4·15 총선 부정선거설’과 함께 ‘계엄군이 민주당을 쓸어버렸어야 한다’는 주장이 난무했다.인천에서 광화문 집회에 참석했다는 김영숙 씨(72)는 “우파 정당인 국민의힘 의원들이 더 밉다”며 “헌법재판소 결정이 나와야 최종 탄핵이 되는 만큼 끝까지 싸우겠다”고 말했다.조철오/최해련 기자


![K팝 업계에도 '친환경' 바람…폐기물 되는 앨범은 '골칫거리' [연계소문]](https://img.hankyung.com/photo/202206/99.27464274.3.jpg)


