현대 모비스 부품 이야기
초음파·카메라센서 기반
IoT 기술과 함께 발전
전자장치 속속 국산화
초음파·카메라센서 기반
IoT 기술과 함께 발전
전자장치 속속 국산화
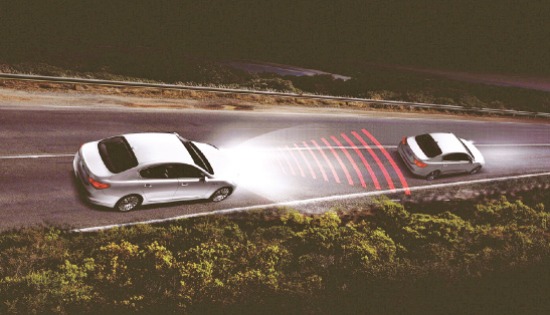

사람이 오감을 이용해 상황을 인식하듯 자동차도 센서를 통해 주변 환경을 파악한다. 현재 운전자의 안전과 편의를 위해 개발된 첨단운전자지원(ADAS) 기술들은 레이더 센서와, 초음파 센서, 카메라 센서를 기반으로 하고 있다. 그러나 향후 무사고 자율주행시스템을 이루기 위해서는 보다 정교하고 정확하게 상황을 인지할 수 있도록 하는 새로운 센서 보강이 필수적이다.
그래도 한계는 있다. 센서기술이 아무리 발전해도 앞에서 사고가 났다거나 앞의 앞 차량이 갑자기 차선을 바꿨다든지 하는 상황까지는 파악하기 힘들다. 이 때문에 차량과 사물 간의 통신을 의미하는 사물인터넷(IoT) 기술이 함께 발전해야 한다. 차량과 인프라 혹은 차량과 차량이 서로 통신을 통해 정보를 주고받으며 주변 상황을 공유함으로써 차량 주변뿐 아니라 더 넓은 지역의 환경을 정확하게 인지할 수 있게 되는 것이다.
출발지부터 목적지까지 완벽히 자율주행하기 위해선 실제 차량의 위치와 차량이 스스로 인식한 차량 위치가 정확히 일치해야 한다. 이 때문에 상대적으로 오차가 큰 기존 위치확인시스템(GPS)보다 더 정밀하게 차량의 위치를 파악할 수 있는 기술을 확보하고 고정밀 지도를 구축해야 한다.
자율 주행차가 운전자 편의를 극대화하는 차량임은 분명하지만 자동차가 사람들의 이동수단인 만큼 안전성이 최우선으로 확보돼야 한다. 많은 업체가 자사 기술의 안전성을 확보하기 위해 시험을 반복하는 이유다.
현대모비스는 경기 화성에 있는 교통안전공단의 주행 시험장에서 자율주행 시험을 하고 있다. 현대모비스 자율주행 자동차는 HG그랜저를 기반으로 하고 있다.
GPS 신호를 보정해 위성신호의 정확도를 높이는 안테나, 차량정보 및 주행정보를 한눈에 보여주는 태블릿 PC, 장애물을 좀더 정확하게 인식하는 레이저 센서, 차량을 통합 제어하는 오토박스를 장착했다. 직선주로와 곡선주로, 교차로 등 다양한 도로 상황을 마련하고, 전방 차량 추월, 보행자 감지 제동, 교차로 교행 차량 감지 등 운전 중 일어날 수 있는 모든 상황을 가정해 안전성을 시험하고 있다.
현재 각종 전자장치를 국산화하는 데 속속 성공하고 있다. 다만 개별 센서의 국산화는 만족할 만큼 이뤄지지 않았다. 현대모비스는 인지분야의 핵심인 센서기술 국산화를 위해 노력할 계획이다.
자료제공 : 현대모비스 기술연구소

![[포토] 홈플러스, 크리스마스 앞두고 '홈플대란' 3주차 행사 진행](https://img.hankyung.com/photo/202412/01.38908317.3.jpg)
![[속보] 12월 1∼10일 수출 12.4% 증가…반도체 43.0%↑](https://img.hankyung.com/photo/202412/02.38395186.3.jpg)




